using UnityEngine;
using System.Collections;
using ProceduralToolkit;
using UnityEngine.UI;
using System.Collections.Generic;
using System.IO;
public class ArgosFibonacci : MonoBehaviour
{
public float m_fRadius = 1.5f;
public ArgosMeshDraft_Fibonacci aMF_Base = new ArgosMeshDraft_Fibonacci();
public ArgosMeshDraft_Fibonacci aMF_Full = new ArgosMeshDraft_Fibonacci();
StreamWriter sWrite;
public GameObject vert_Prefab;
public class GO_Tracker
{
public GameObject go;
public FibVert fV_FuncVert;
}
public List<GO_Tracker> lstFIB_GO = new List<GO_Tracker>();
void Start ()
{
sWrite = new StreamWriter("Argos_Fib_Voronoi.txt");
Quaternion q;
Vector3 vN_In;
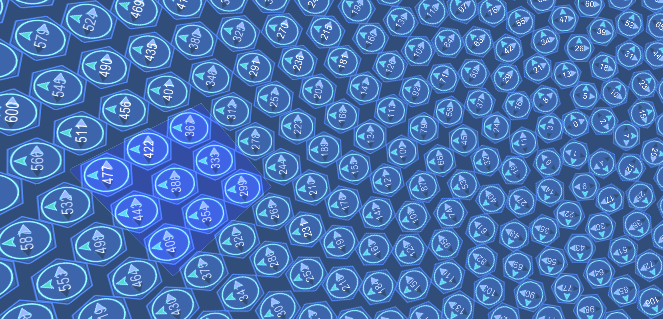
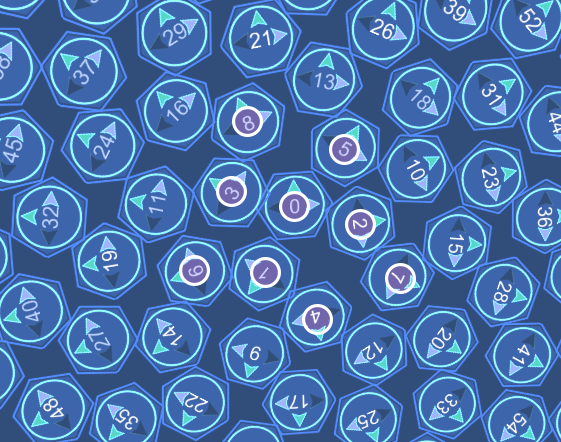
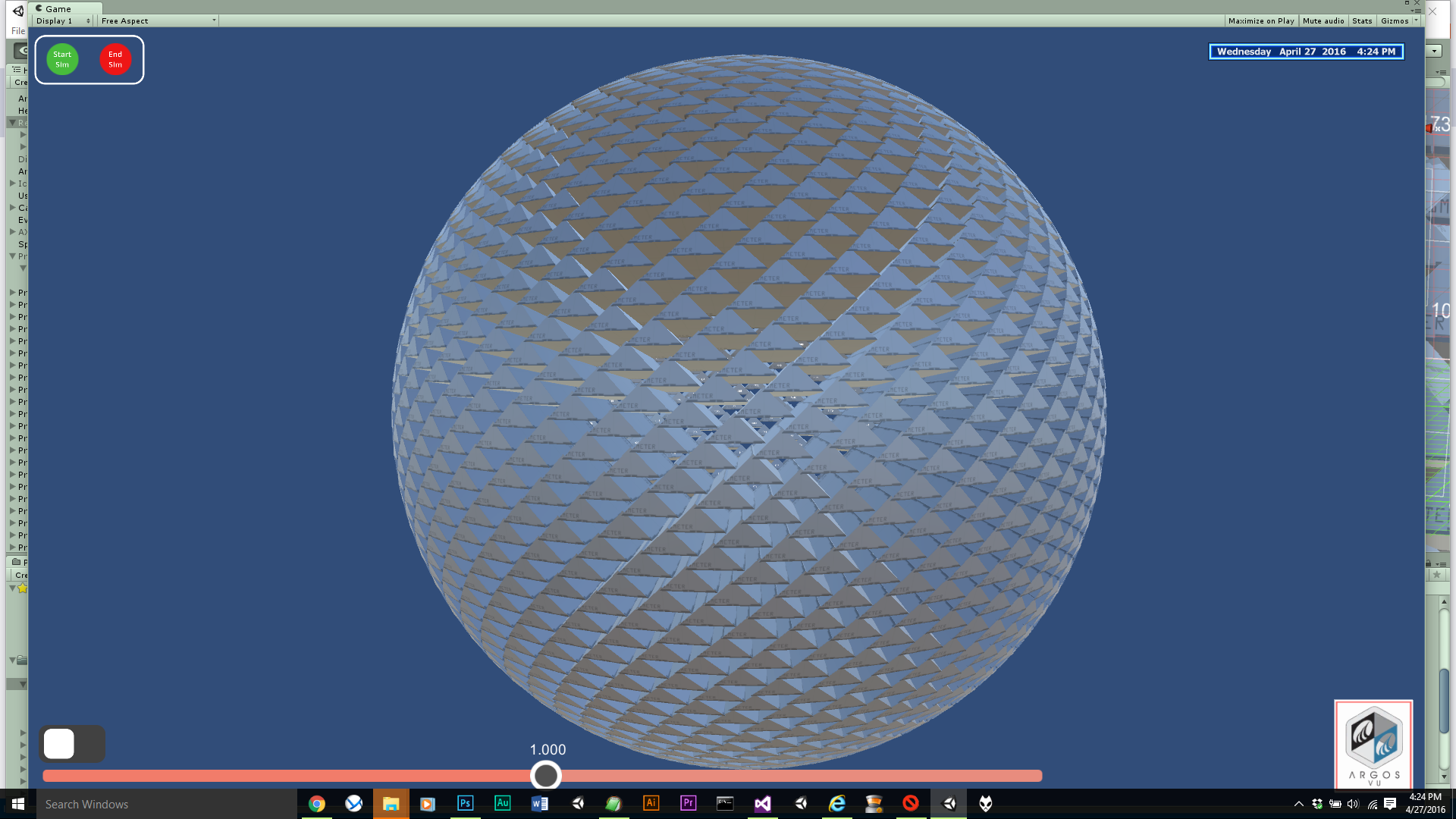
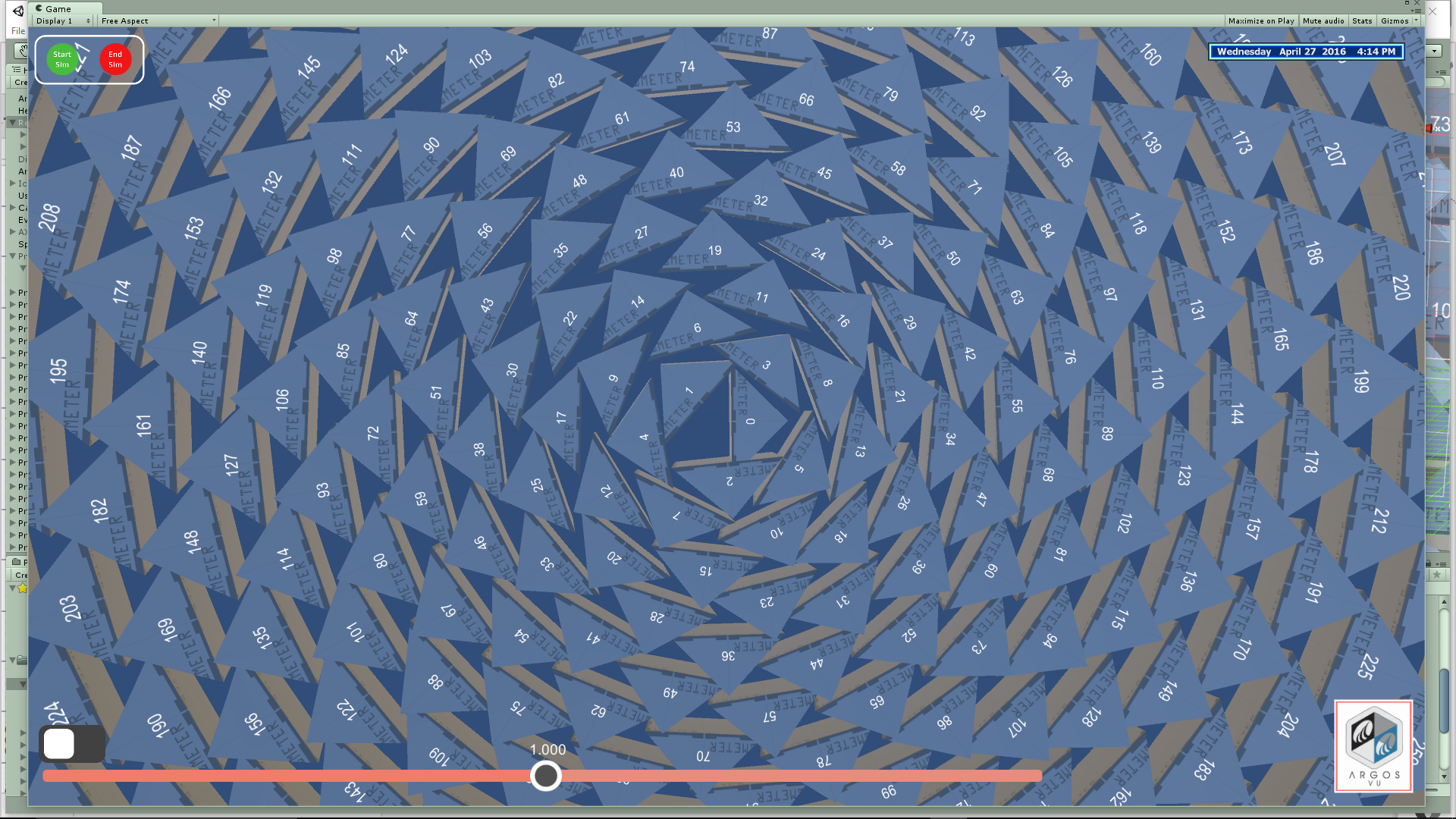
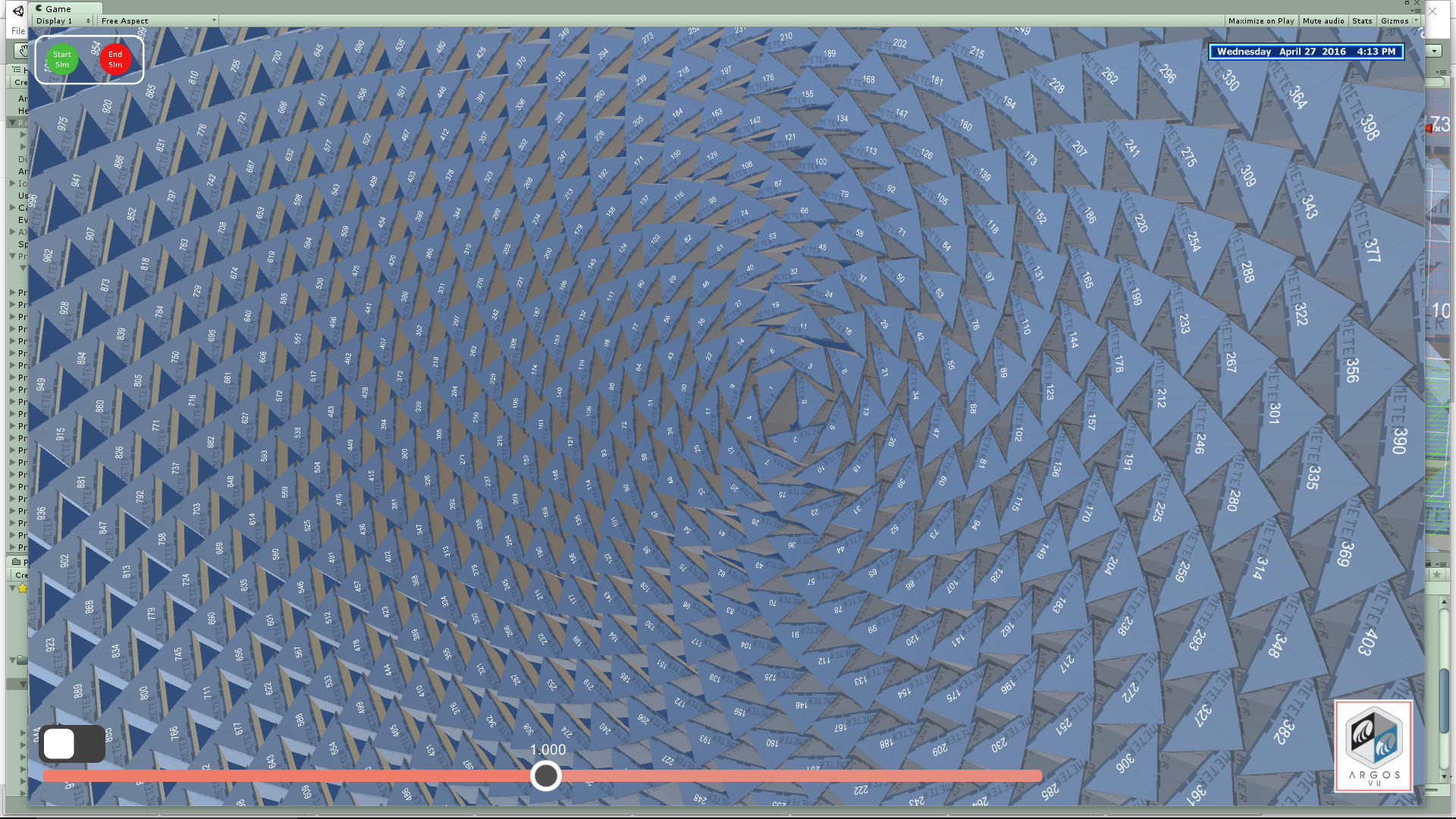
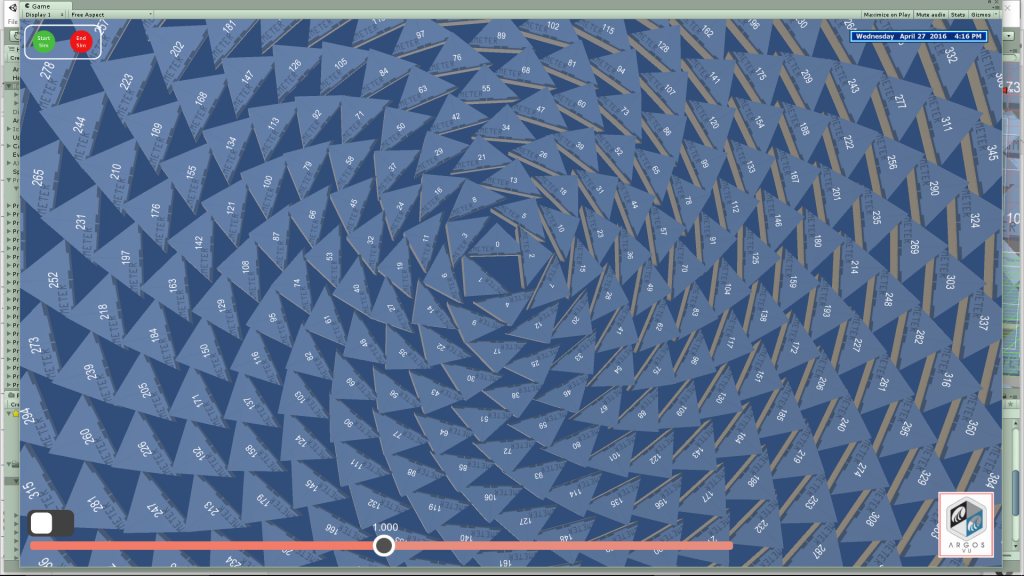
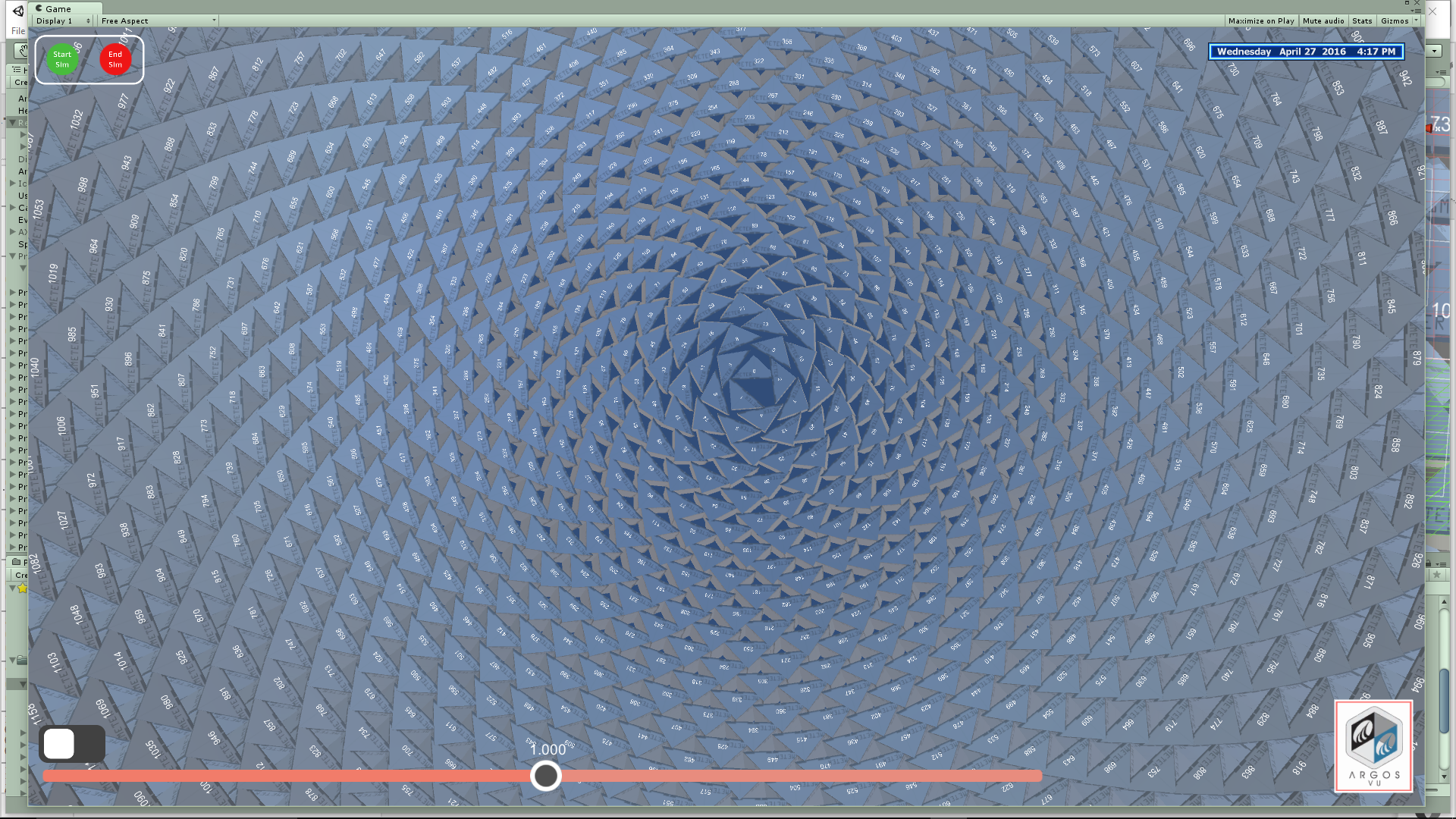
sphere_fibonacci_build_cartesian(2500);
for (int i = 0; i < aMF_Base.funcVerts.Count; i++)
{
vN_In = aMF_Base.funcVerts[i].vPos.normalized;
q = Quaternion.LookRotation(vN_In);
int lev0, lev1, lev2, lev3;
GameObject gO;
GO_Tracker gT;
gO = (GameObject)Instantiate(vert_Prefab, aMF_Base.funcVerts[i].vPos, q);
gT = new GO_Tracker();
gT.fV_FuncVert = new FibVert();
gT.go = gO;
gT.fV_FuncVert.vPos = aMF_Base.funcVerts[i].vPos;
lstFIB_GO.Add(gT);
lstFIB_GO[lstFIB_GO.Count - 1].go.GetComponentInChildren<Text>().text = i.ToString();
}
foreach (GO_Tracker gActedUpon in lstFIB_GO)
{
gActedUpon.go.transform.position = gActedUpon.fV_FuncVert.vPos;
}
}
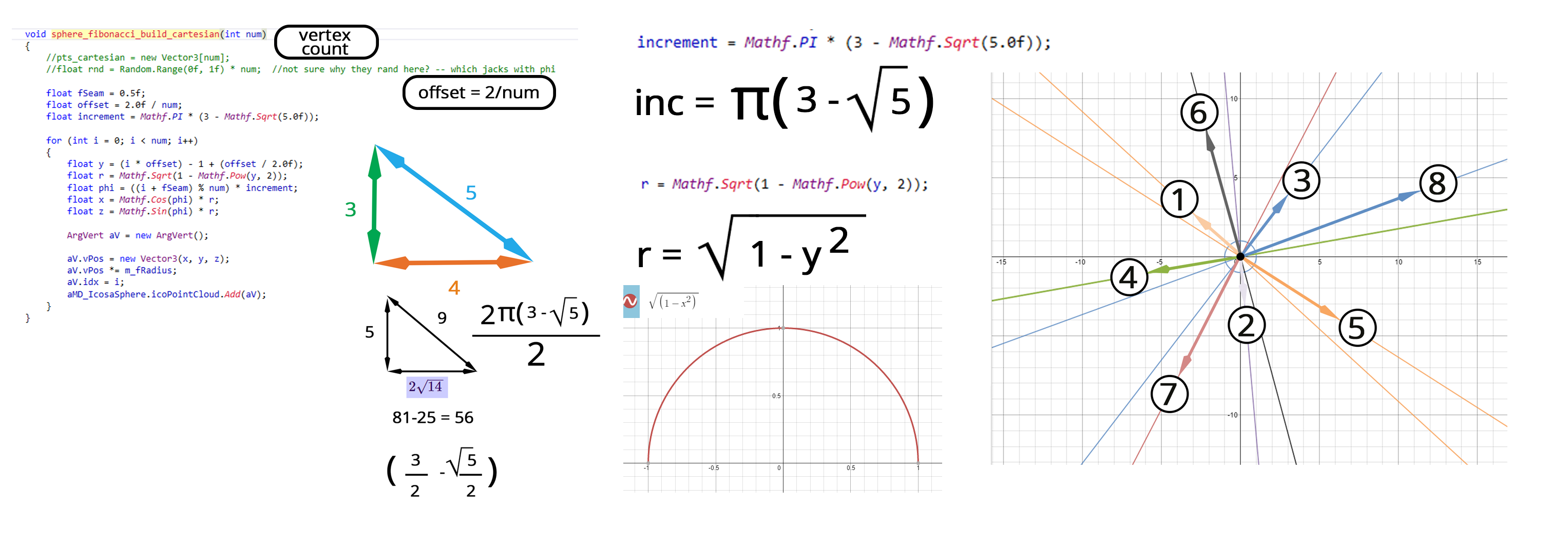
void sphere_fibonacci_build_cartesian(int num)
{
float fSeam = 0.5f;
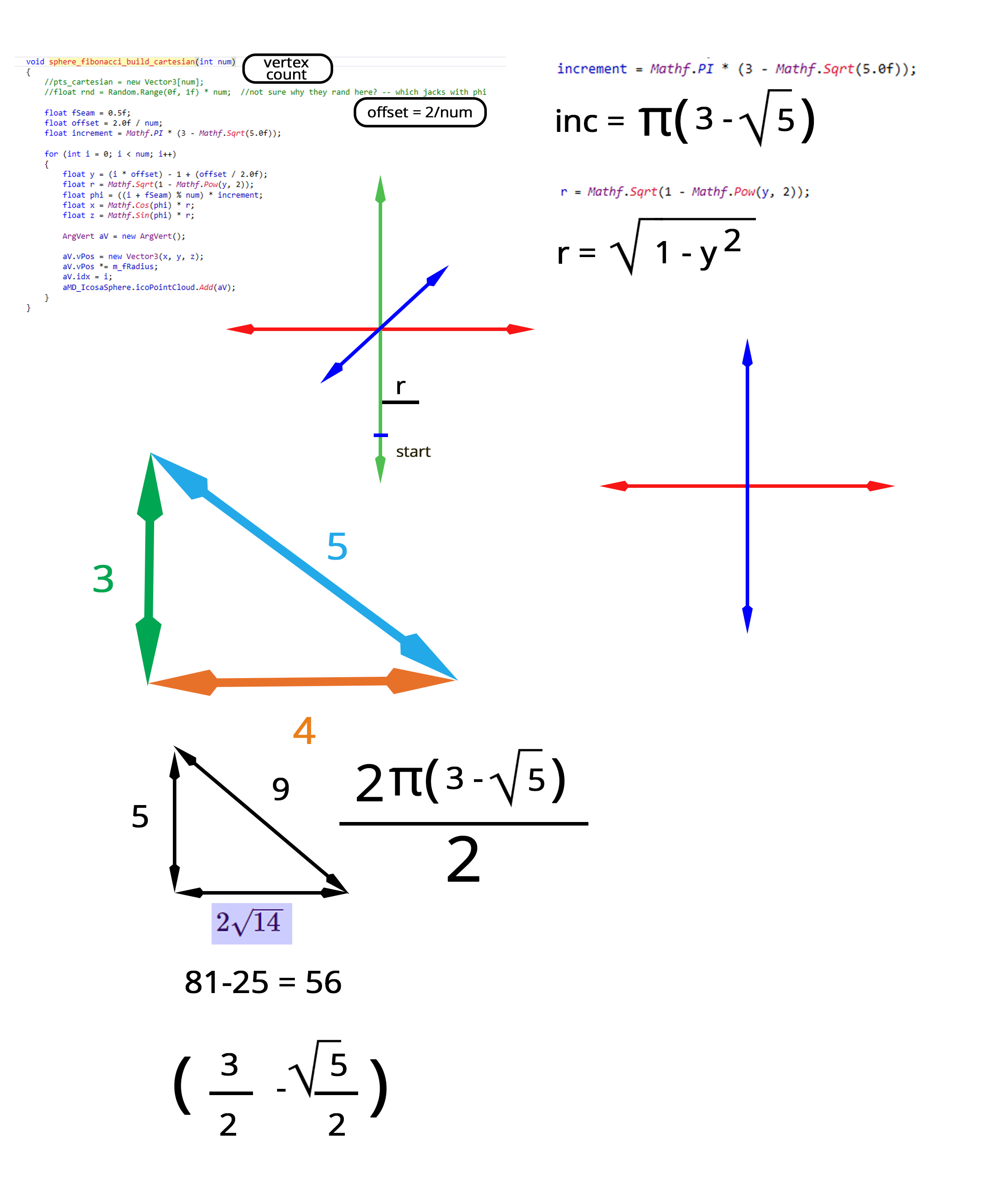
float offset = 2.0f / num;
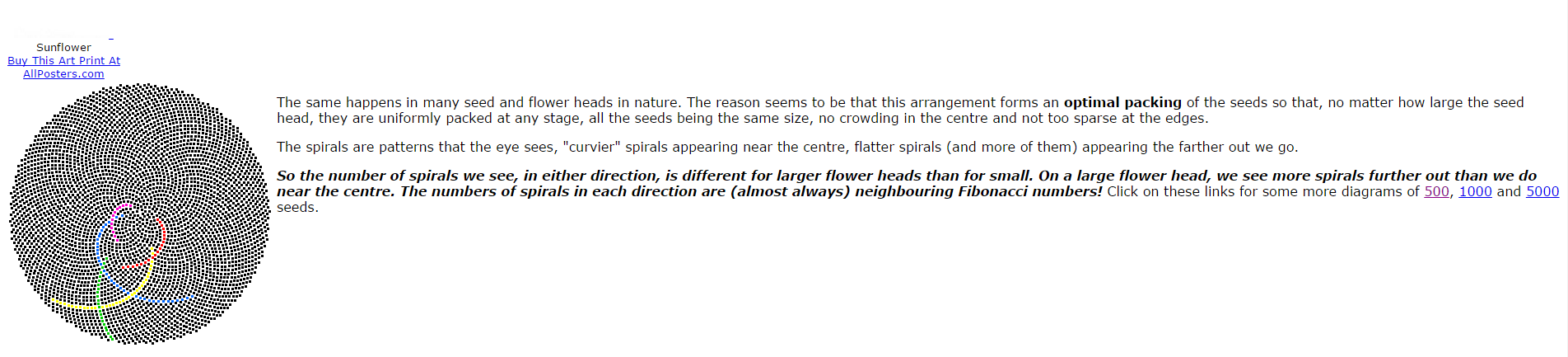
float increment = Mathf.PI * (3 - Mathf.Sqrt(5.0f));
for (int i = 0; i < num; i++)
{
float y = (i * offset) - 1 + (offset / 2.0f);
float r = Mathf.Sqrt(1 - Mathf.Pow(y, 2));
float phi = ((i + fSeam) % num) * increment;
float x = Mathf.Cos(phi) * r;
float z = Mathf.Sin(phi) * r;
FibVert fV = new FibVert();
fV.vPos = new Vector3(x, y, z);
fV.vPos *= m_fRadius;
fV.idx = i;
aMF_Base.funcVerts.Add(fV);
}
}
void Update ()
{
}
}
using UnityEngine;
using System;
using System.Collections;
using ProceduralToolkit;
using System.Collections.Generic;
namespace ProceduralToolkit
{
public class FibVert
{
public Vector3 vPos;
public float dist;
public Vector3 vForce; //constrain position to sphere radius
public Vector3 vVel;
public float maxDistToNeighbor = 0;
public float minDistToNeighbor = float.MaxValue;
public int idx;
public class NB
{
public FibVert fV;
public float distFrom;
public NB()
{
fV = null;
distFrom = float.MaxValue;
}
}
public List<NB> avNeigbor = new List<NB>();
public FibVert()
{
for (int i = 0; i < 6; i++)
{
avNeigbor.Add(new NB());
avNeigbor[i].fV = this;
}
vPos = new Vector3();
}
public float getMaxDistToNeighbor()
{
maxDistToNeighbor = 0;
for (int i = 0; i < 6; i++)
{
if (avNeigbor[i].distFrom > maxDistToNeighbor)
{
maxDistToNeighbor = avNeigbor[i].distFrom;
}
}
return maxDistToNeighbor;
}
public float getMinDistToNeighbor()
{
minDistToNeighbor = float.MaxValue;
for (int i = 0; i < 6; i++)
{
if (avNeigbor[i].distFrom < minDistToNeighbor)
{
minDistToNeighbor = avNeigbor[i].distFrom;
}
}
return minDistToNeighbor;
}
public bool isAVinNeighborList(FibVert fV)
{
for (int i = 0; i < 6; i++)
{
if (avNeigbor[i].fV == fV) return true;
}
return false;
}
public int isLessThan(float dist)
{
for (int i = 0; i < 6; i++)
{
if (dist < avNeigbor[i].distFrom) return i;
}
return -1;
}
public bool goesHere(int i, float dist, FibVert aV_Contender)
{
if (dist < avNeigbor[i].distFrom)
{
NB nb = new NB();
nb.fV = aV_Contender;
nb.distFrom = dist;
avNeigbor.Insert(i, nb);
avNeigbor.RemoveAt(6);
return true;
}
return false;
}
public void insNeighbor_One_Shot(float dist, FibVert aV_Contender)
{
for (int i = 0; i < 6; i++)
{
if (goesHere(i, dist, aV_Contender)) return;
}
}
}
public class ArgosMeshDraft_Fibonacci : MeshDraft
{
public List<Vector3> vTriCenter = new List<Vector3>();
public List<int> vQual = new List<int>();
public List<FibVert> funcVerts = new List<FibVert>();
public ArgosMeshDraft_Fibonacci() : base()
{
}
public void Add_ITN_Node(MeshDraft tri, int sector, int nodePath, int ITG_idx)
{
Vector3 vC = (tri.vertices[0] + tri.vertices[1] + tri.vertices[2]) / 3f;
FibVert fV = new FibVert();
fV.vPos = vC;
fV.idx = ITG_idx;
funcVerts.Add(fV);
}
public void SetSortDist(Vector3 Apex)
{
foreach (FibVert fV in funcVerts)
{
fV.dist = (fV.vPos - Apex).magnitude;
}
}
public void sortPointCloud()
{
funcVerts.Sort((x, y) => x.dist.CompareTo(y.dist));
}
public void AddTriQual(MeshDraft tri)
{
Vector3 vC = (tri.vertices[0] + tri.vertices[1] + tri.vertices[2]) / 3f;
Add(tri);
for (int i = 0; i < 3; i++)//Track the quality of the triangle UVs
{
vTriCenter.Add(vC);
//vQual.Add(qual);
}
}
public void AddHex(MeshDraft tri)//from triangle see: http://argos.vu/wp-content/uploads/2016/04/HCs-1.png
{
Vector3 HC = (tri.vertices[0] + tri.vertices[1] + tri.vertices[2]) / 3f;
Vector3 H0 = (tri.vertices[1] + tri.vertices[0]) / 2f;
Vector3 H1 = (tri.vertices[1] + HC) / 2f;
Vector3 H2 = (tri.vertices[2] + tri.vertices[1]) / 2f;
Vector3 H3 = (tri.vertices[2] + HC) / 2f;
Vector3 H4 = (tri.vertices[0] + tri.vertices[2]) / 2f;
Vector3 H5 = (tri.vertices[0] + HC) / 2f;
List<Vector3> vL = new List<Vector3>(8) { HC, H0, H1, H2, H3, H4, H5, H0 };
List<Vector2> uvMapL = new List<Vector2>(8) { new Vector2(0.5f, 0.5f), new Vector2(0.5f, 1f), new Vector2(1, 0.75f), new Vector2(1, 0.25f), new Vector2(0.5f, 0), new Vector2(0, 0.25f), new Vector2(0, 0.75f), new Vector2(0.5f, 1f) };
Add(HexFan(vL, uvMapL));
}
public void AddTriQual(MeshDraft tri, int qual)
{
Vector3 vC = (tri.vertices[0] + tri.vertices[1] + tri.vertices[2]) / 3f;
Add(tri);
for (int i = 0; i < 3; i++)//Track the quality of the triangle UVs
{
vTriCenter.Add(vC);
vQual.Add(qual);
}
}
}
}