Try – Boundaries Next
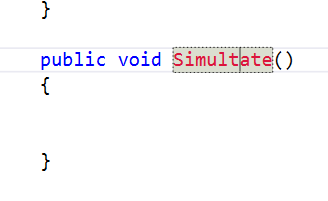
public void Simulate()
{
Vector2 vel0;
Vector2 pos0;
Vector2 attr_pos = Vector2.zero;
Vector2 vel1;
Vector2 pos1;
float deltT = 0.005f;
float C = 10;
for (int j = 0; j < 10; j++)
{
vel0 = new Vector2(2, 0);
pos0 = new Vector2(-3, 1);
sSimulate.WriteLine(C.ToString());
sSimulate.WriteLine(" ");
for (int i = 0; i < 1000; i++)
{
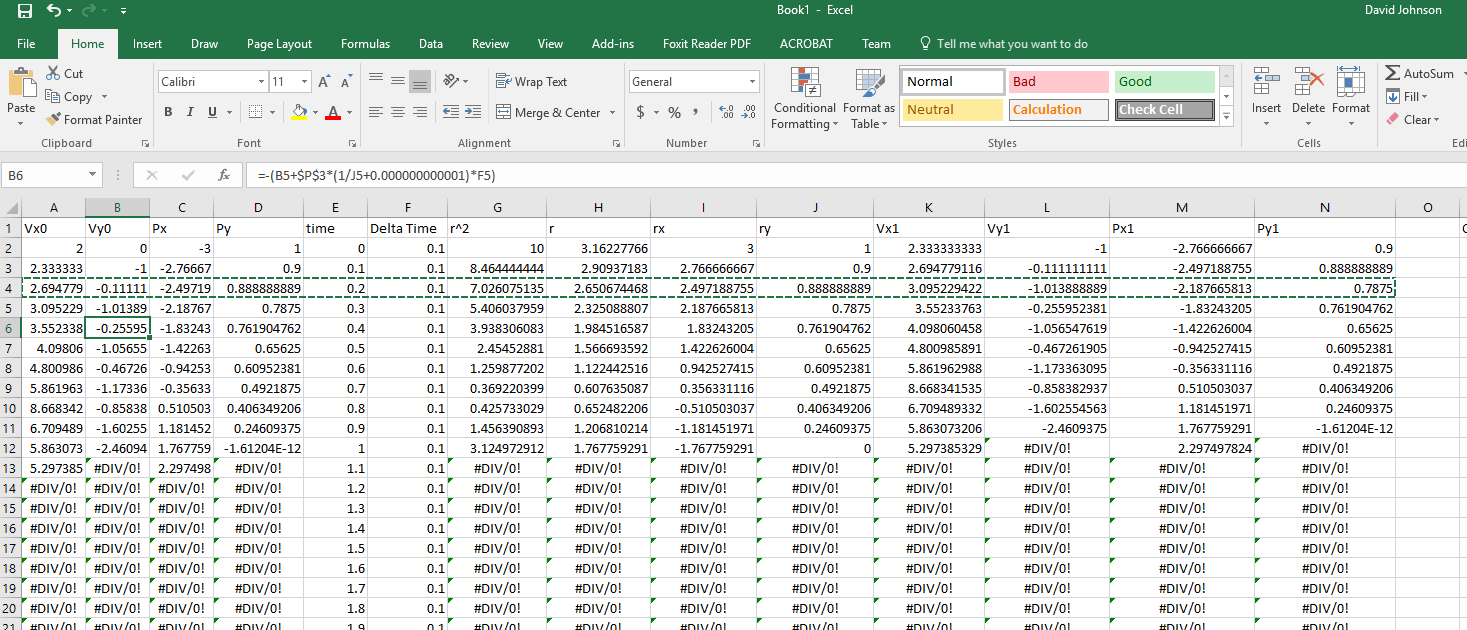
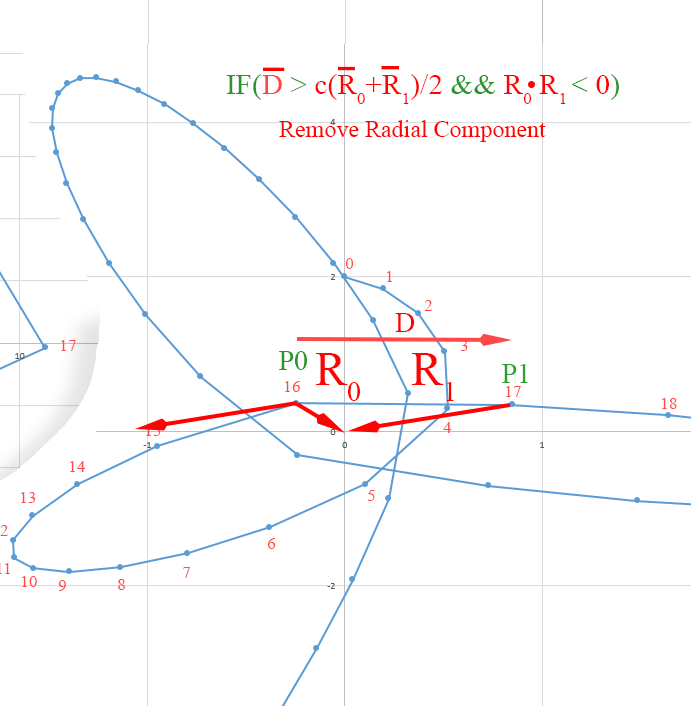
Vector2 attr_dir = (attr_pos - pos0).normalized;
float attr_mag = (attr_pos - pos0).magnitude;
vel1 = vel0 + attr_dir * (C / attr_mag) * deltT;
pos1 = pos0 + vel1 * deltT;
sSimulate.WriteLine(pos0.x.ToString("F6") + " , " + pos0.y.ToString("F6") + " , " + vel0.x.ToString("F6") + " , " + vel0.y.ToString("F6") + " , " + attr_mag.ToString("F6") + " , " + attr_dir.x.ToString("F6") + " , " + attr_dir.y.ToString("F6"));
vel0 = vel1;
pos0 = pos1;
}
C += 10;
sSimulate.WriteLine(" ");
sSimulate.WriteLine(" ");
}
sSimulate.Close();
}
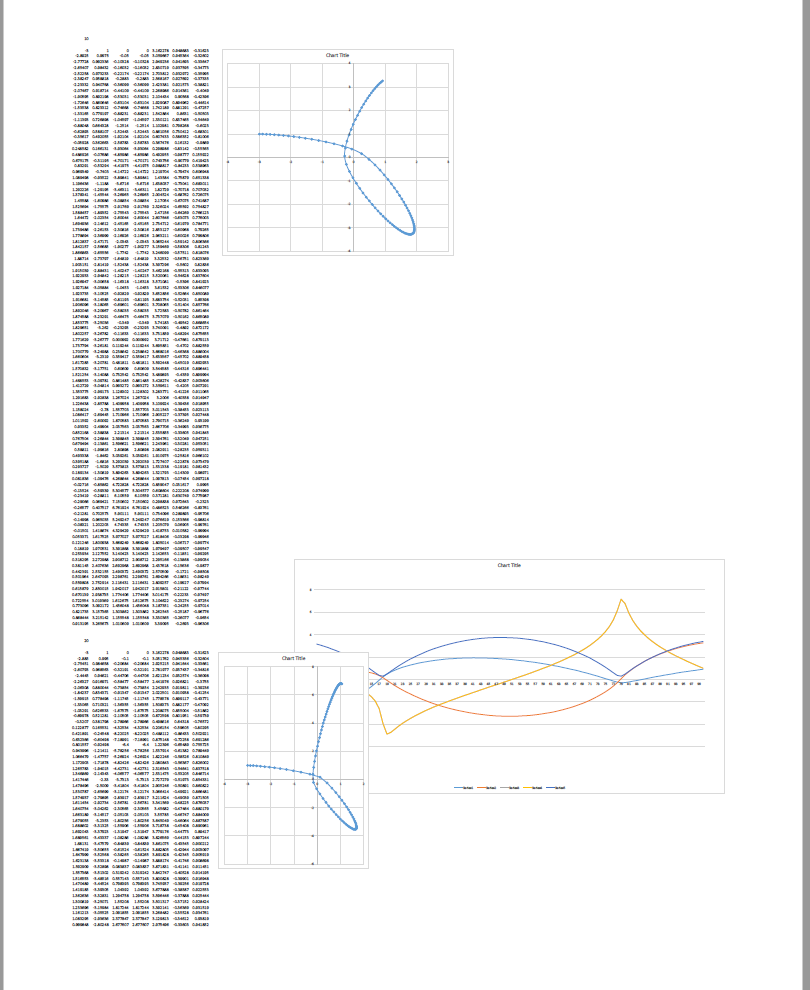
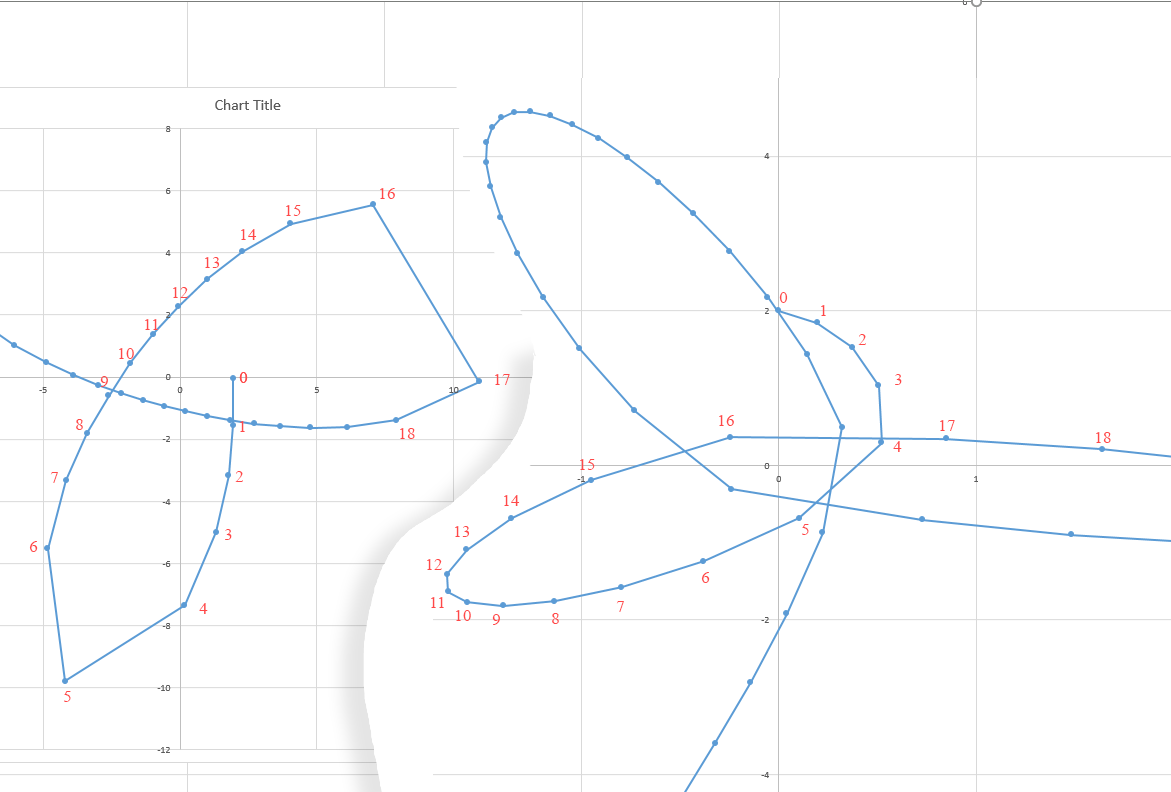
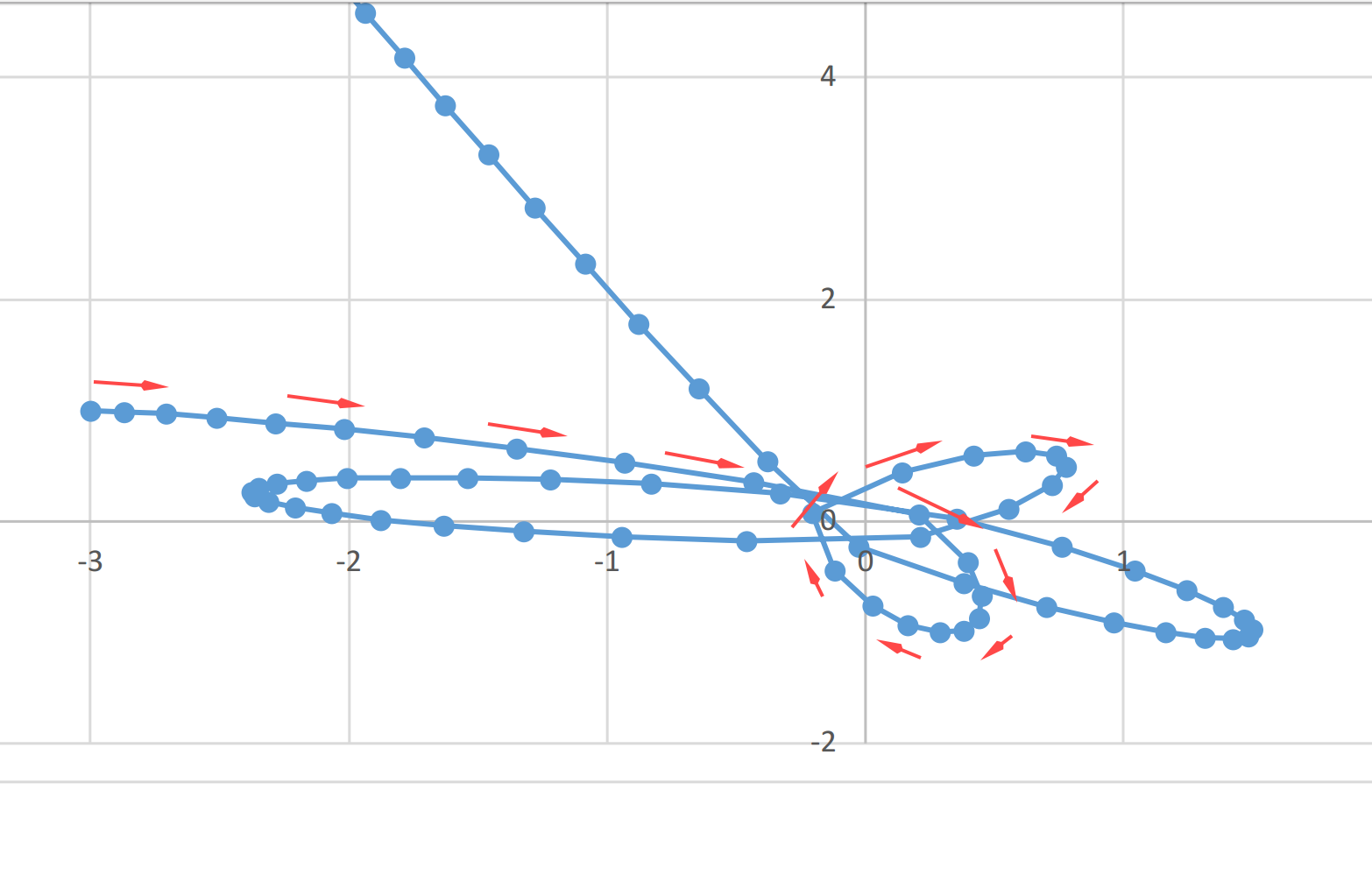
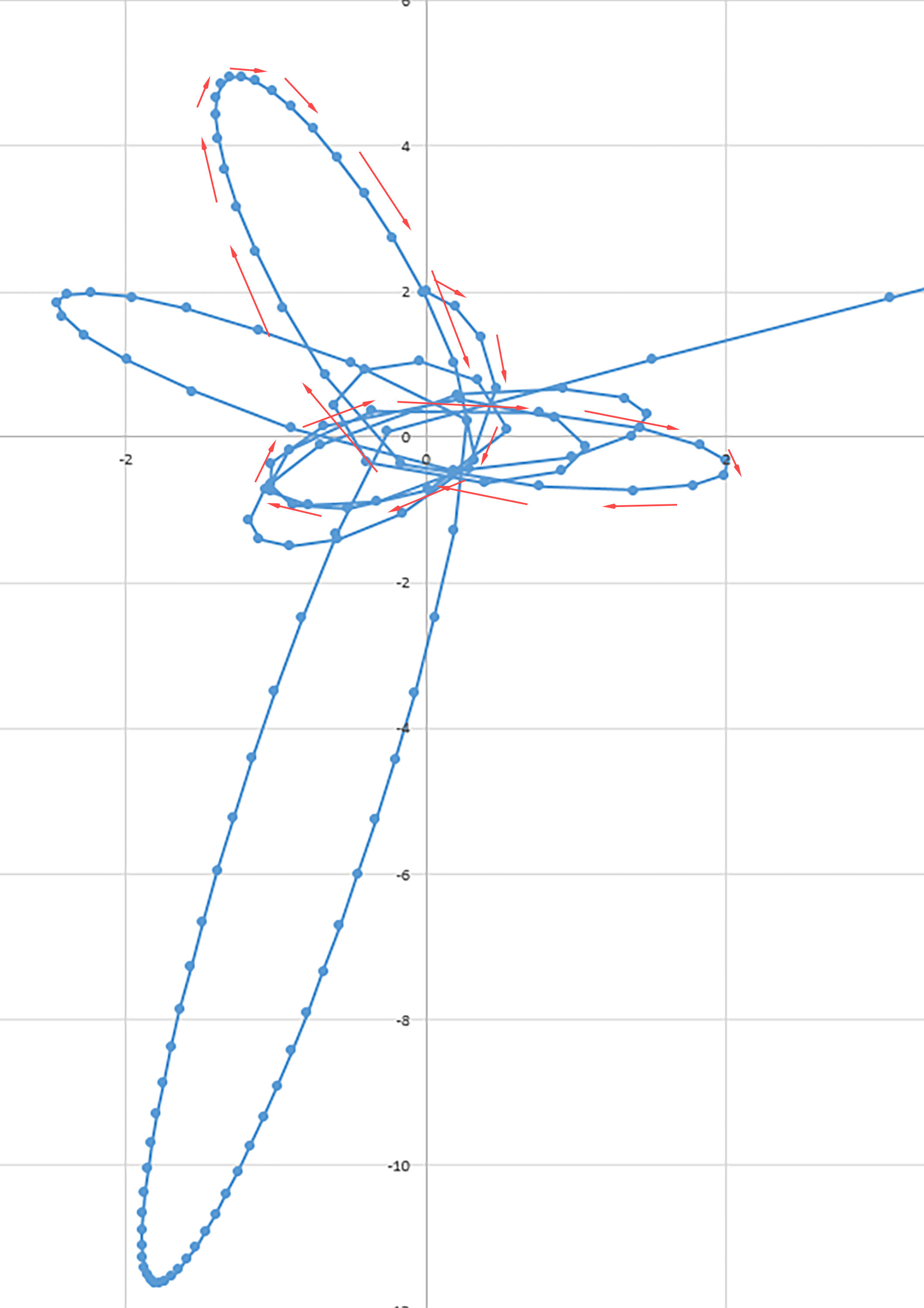
Simulation_1