https://youtu.be/GaAjve4NZd0
Hang a rope from one controller with large Mass at the end – Can you get it to Orbit through Angular Momentum?
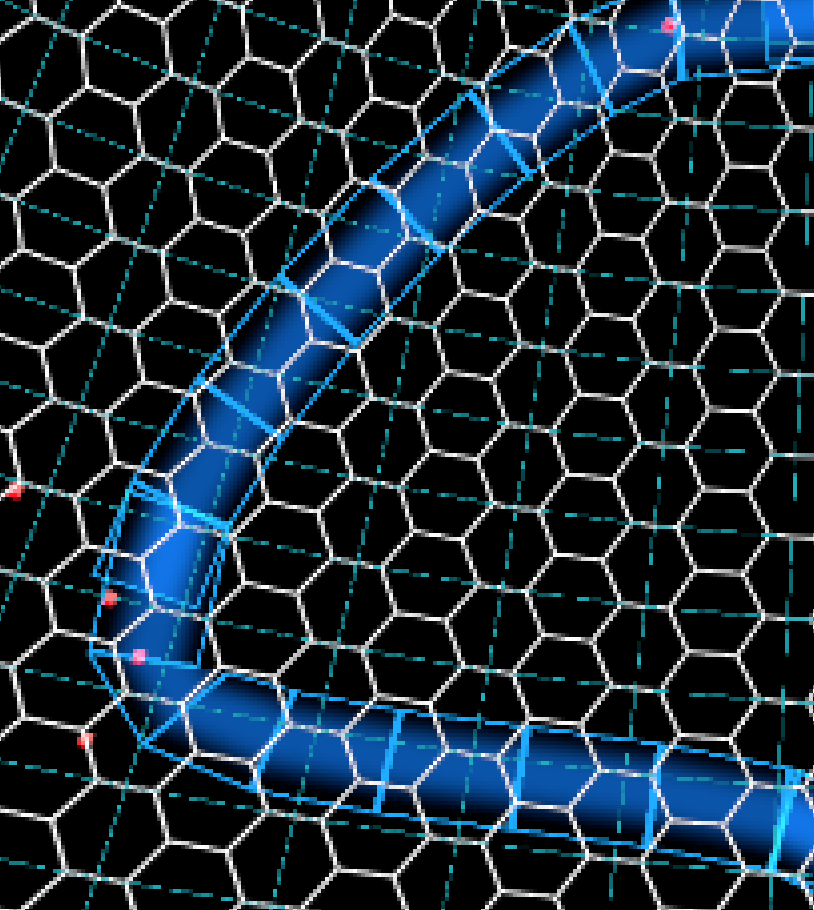
Collision – Performance – Expect Hit
using UnityEngine;
using System.Collections;
using ProceduralToolkit;
using UnityEngine.UI;
using System.Collections.Generic;
using System.Runtime.Serialization;
using VRTK;
using System;
[System.Serializable]
public class SerialVect3
{
public SerialVect3(Vector3 vIn)
{
_vx = vIn.x;
_vy = vIn.y;
_vz = vIn.z;
}
public float _vx;
public float _vy;
public float _vz;
}
public class Argos_Hex_Brush : MonoBehaviour
{
Mesh mesh;
[SerializeField]
Material _material;
public VRTK_ControllerEvents ctrl_events;
public AnimationCurve scaleCurve; //let's say you edit from inspector, but you can built at runtime if you prefer
MaterialPropertyBlock _block;
public GameObject newHex_Loc_Prefab;
private ArgosMeshDraft amDraft;
public ArgosMeshDraft AmDraft
{
get { return amDraft; }
}
public ArgosSphere_Indexing argosSphere;
private int lastHexIdx = -1;
public Color color;
public Text dbgTex;
private UI_Control ui_Control;
List<Vector3> CatmullRom_Point_List = new List<Vector3>();
[SerializeField]
public List<SerialVect3> Equi_Distant_Points = new List<SerialVect3>();
private Vector3 vLast_Point;
private Vector3 vCursPos;
private Vector3 vUp_Last;
void Start ()
{
MeshFilter mf = GetComponent<MeshFilter>();
if (mf.mesh == null)
mf.mesh = new Mesh();
mesh = mf.mesh;
amDraft = new ArgosMeshDraft();
_block = new MaterialPropertyBlock();
amDraft.initQuadPool_AnimationCurve(5000, scaleCurve);
ui_Control = GameObject.Find("UI_Control_Canvas").GetComponent < UI_Control>();
ctrl_events.TriggerPressed += new ControllerInteractionEventHandler(Triggr_StartCollectingPoints);
ctrl_events.TriggerReleased += new ControllerInteractionEventHandler(Triggr_StopCollectingPoints);
}
public void SetCursPos(Vector3 vPos)
{
vCursPos = vPos;
}
public void Triggr_StartCollectingPoints(object sender, ControllerInteractionEventArgs e)
{
vLast_Point = vCursPos;
CatmullRom_Point_List.Clear();
CatmullRom_Point_List.Add(vCursPos);
}
public void Triggr_StopCollectingPoints(object sender, ControllerInteractionEventArgs e)
{
}
float accumTime = 0f;
void Update ()
{
accumTime += Time.deltaTime;
amDraft.QuadListUpdate();
GetComponent<MeshFilter>().mesh = amDraft.ToMeshInternal();//
//Vector3 vH0 = a12horns.v12HORN_Norms[0];
Quaternion q;
//for (int i = 0; i < 12; i++)
//{
//q = Quaternion.FromToRotation(vH0, a12horns.v12HORN_Norms[i]);
q = Quaternion.identity;
//print(q.ToString());
Graphics.DrawMesh(GetComponent<MeshFilter>().mesh, Vector3.zero, q, _material, gameObject.layer, null, 0, _block);
//}
}
public int GetNumVertices()
{
return amDraft.vertices.Count;
}
public Vector3 GetVertex(int i)
{
return amDraft.vertices[i];
}
public void SetVertex(int i, Vector3 v)
{
amDraft.vertices[i] = v;
}
public void MeshDraft_ToMesh()
{
if (amDraft != null)
{
GetComponent<MeshFilter>().mesh = amDraft.ToMesh();
}
}
public void initAddMeshDraft(MeshDraft md)
{
MeshFilter mf = GetComponent<MeshFilter>();
if (mf.mesh == null)
mf.mesh = new Mesh();
mesh = mf.mesh;
amDraft = new ArgosMeshDraft();
if (amDraft != null)
{
amDraft.Add(md);
GetComponent<MeshFilter>().mesh = amDraft.ToMesh();
}
}
public void Paint(Vector3 v0, Vector3 v1, Vector3 v2, Vector3 v3, Color col, float duration, float fade_start)
{
if (amDraft != null)
{
amDraft.Quad_Paint(v0, v1, v2, v3, col, duration, fade_start);
}
}
public void PaintHex(Vector3 pos, Vector3 vOffset, float lineWidth)
{
float pointDist = lineWidth * 8f;
Vector3 vDiff = pos - vLast_Point;
if (vDiff.magnitude > pointDist)
{
CatmullAdd(pos + vOffset,lineWidth);
vLast_Point = pos;
}
int newIdx = argosSphere.getHexIdx(pos);
dbgTex.text = "CM DIST = " + pointDist.ToString("F3");
if(newIdx != lastHexIdx && newIdx != -1)
{
List<Vector3> vL = argosSphere.HexQuads[newIdx].mdH.vertices;
Paint(vL[0] + vOffset, vL[1] + vOffset, vL[3] + vOffset, vL[2] + vOffset, color, 0.1f, 0.7f);
lastHexIdx = newIdx;
}
}
public void CatmullAdd(Vector3 pos,float lineWidth)
{
Vector3 vUp;
Vector3 vc12;
Vector3 vcIn; //break by 8 for music
CatmullRom_Point_List.Add(pos);
Instantiate(newHex_Loc_Prefab, pos, Quaternion.identity);
if(CatmullRom_Point_List.Count > 3)
{
Vector3[] splinePoints = new Vector3[8];
int cmc = CatmullRom_Point_List.Count - 1;
for (int i = 0; i<8; i++)
{
splinePoints[i] = ReturnCatmullRom((float)i / 8f,
CatmullRom_Point_List[cmc - 3],
CatmullRom_Point_List[cmc - 2],
CatmullRom_Point_List[cmc - 1],
CatmullRom_Point_List[cmc]);
SerialVect3 sv3 = new SerialVect3(splinePoints[i]);
Equi_Distant_Points.Add(sv3);//add points to serialized equidistant Vector3s
}
if (CatmullRom_Point_List.Count == 4)
{
vc12 = CatmullRom_Point_List[cmc - 1] - CatmullRom_Point_List[cmc - 2];
vcIn = CatmullRom_Point_List[cmc - 2] - argosSphere.transform.position;
vc12.Normalize();
vcIn.Normalize();
vUp_Last = Vector3.Cross(vcIn, vc12);
vUp_Last.Normalize();
}
Vector3[] verts = new Vector3[4];
for (int j = 0; j<7;j++)
{
Vector3 v12 = splinePoints[j + 1] - splinePoints[j];
Vector3 vIn = splinePoints[j + 1] - argosSphere.transform.position;
vIn.Normalize();
v12.Normalize();
vUp = Vector3.Cross(vIn, v12);
vUp.Normalize();
verts[0] = splinePoints[j] - vUp_Last * lineWidth / 2f;
verts[1] = splinePoints[j] + vUp_Last * lineWidth / 2f;
verts[2] = splinePoints[j+1] + vUp * lineWidth / 2f;
verts[3] = splinePoints[j+1] - vUp * lineWidth / 2f;
Paint(verts[0], verts[1], verts[2], verts[3], color, 30f, 0.7f);
vUp_Last = vUp;
}
vc12 = CatmullRom_Point_List[cmc-1] - splinePoints[6];
vcIn = CatmullRom_Point_List[cmc - 1] - argosSphere.transform.position;
vc12.Normalize();
vcIn.Normalize();
vUp = Vector3.Cross(vcIn, vc12);
vUp.Normalize();
verts[0] = splinePoints[7] - vUp_Last * lineWidth / 2f;
verts[1] = splinePoints[7] + vUp_Last * lineWidth / 2f;
verts[2] = CatmullRom_Point_List[cmc - 1] + vUp * lineWidth / 2f;
verts[3] = CatmullRom_Point_List[cmc - 1] - vUp * lineWidth / 2f;
Paint(verts[0], verts[1], verts[2], verts[3], color, 30f, 0.7f);
vUp_Last = vUp;
}
}
//Returns a position between 4 Vector3 with Catmull-Rom Spline algorithm
//http://www.iquilezles.org/www/articles/minispline/minispline.htm
Vector3 ReturnCatmullRom(float t, Vector3 p0, Vector3 p1, Vector3 p2, Vector3 p3)
{
Vector3 a = 0.5f * (2f * p1);
Vector3 b = 0.5f * (p2 - p0);
Vector3 c = 0.5f * (2f * p0 - 5f * p1 + 4f * p2 - p3);
Vector3 d = 0.5f * (-p0 + 3f * p1 - 3f * p2 + p3);
Vector3 pos = a + (b * t) + (c * t * t) + (d * t * t * t);
return pos;
}
public void AddMeshDraft(MeshDraft md)
{
if (amDraft != null)
{
amDraft.Add(md);
GetComponent<MeshFilter>().mesh = amDraft.ToMesh();
}
}
public void AddMeshDraft_Only(MeshDraft md)
{
if (amDraft != null)
{
amDraft.Add(md);
}
}
public void AddQuad(Vector3 v0, Vector3 v1, Vector3 v2, Vector3 v3)
{
if (amDraft != null)
{
amDraft.Add(MeshDraft.Quad(v0, v1, v2, v3));
GetComponent<MeshFilter>().mesh = amDraft.ToMesh();
}
}
public void AddQuad(Vector3 v0, Vector3 v1, Vector3 v2, Vector3 v3, Color col)
{
if (amDraft != null)
{
amDraft.Add(MeshDraft.Quad(v0, v1, v2, v3, col));
GetComponent<MeshFilter>().mesh = amDraft.ToMesh();
}
}
}
using UnityEngine;
using System;
using System.IO;
using System.Runtime.Serialization.Formatters.Binary;
using UnityEngine.UI;
using System.Collections.Generic;
/// <summary>
/// Class that handles the application data.
/// </summary>
public class Serialize : MonoBehaviour
{
[Serializable]
public class UserData
{
public float rQuadDist;
public float rCamDist;
public float uiDist;
public float echo_gain;
public float echo_time;
public float delay_delta;
public float echo_attenuation;
}
static UserData URD;//USER READ DATA
static UserData USD;//USER SAVE DATA
private HMD_Ctrl_Tracking hmd_Ctrl_Tracking;
public Slider rQuadDistSlider;
public Slider rCamDistSlider;
public Slider uiDistSlider;
public Slider echo_gainSlider;
public Slider echo_timeSlider;
public Slider delay_deltaSlider;
public Slider echo_attenuationSlider;
StreamWriter sWrite;
StreamWriter sRead;
void Start()
{
URD = new UserData();
USD = new UserData();
sWrite = new StreamWriter("Test_Save_Pdata.txt");
sRead = new StreamWriter("Test_Read_Pdata.txt");
LoadSettings();
print("rQuadDist = " + URD.rQuadDist.ToString("F3"));
print("rCamDist = " + URD.rCamDist.ToString("F3"));
hmd_Ctrl_Tracking = transform.parent.gameObject.GetComponent<HMD_Ctrl_Tracking>();
}
public void LoadSettings()
{
LoadFile("ArgosData");
SetUserPrefs();
}
public void SaveCurrentSettings()
{
USD.rQuadDist = rQuadDistSlider.value;
USD.rCamDist = rCamDistSlider.value;
USD.uiDist = uiDistSlider.value;
USD.echo_gain = echo_gainSlider.value;
USD.echo_time= echo_timeSlider.value;
USD.delay_delta = delay_deltaSlider.value;
USD.echo_attenuation = echo_attenuationSlider.value;
SaveFile("ArgosData", USD);
}
public void OnApplicationQuit()
{
sWrite.Close();
sRead.Close();
SaveCurrentSettings();
}
private void SetUserPrefs()
{
rQuadDistSlider.value = URD.rQuadDist;
rCamDistSlider.value = URD.rCamDist;
uiDistSlider.value = URD.uiDist;
echo_gainSlider.value = URD.echo_gain;
echo_timeSlider.value = URD.echo_time;
delay_deltaSlider.value = URD.delay_delta;
echo_attenuationSlider.value = URD.echo_attenuation;
}
private static UserData UserData_Defaults()
{
UserData NewUD = new UserData();
NewUD.rQuadDist = 70f;
NewUD.rCamDist = 2500f;
NewUD.uiDist = 70f;
NewUD.echo_gain = 0.42f;
NewUD.echo_time = 1.54f;
NewUD.delay_delta = -0.37f;
NewUD.echo_attenuation = 0.65f;
return NewUD;
}
public void SavePlist(List<SerialVect3> pList)
{
for(int i = 0; i<pList.Count;i++)
{
sWrite.WriteLine(i.ToString() + " Vect3(" + pList[i]._vx.ToString("F3") + ", "
+ pList[i]._vy.ToString("F3") + ", "
+ pList[i]._vz.ToString("F3") + "),");
}
Save_PList("plist.dat", pList);
}
public List<SerialVect3> LoadPlist()
{
List<SerialVect3> pList;
pList = Load_PList("plist.dat");
for (int i = 0; i < pList.Count; i++)
{
sRead.WriteLine(i.ToString() + " Vect3(" + pList[i]._vx.ToString("F3") + ", "
+ pList[i]._vy.ToString("F3") + ", "
+ pList[i]._vz.ToString("F3") + "),");
}
return pList;
}
private static void SaveFile(string filename, UserData obj)
{
try
{
filename = Application.persistentDataPath + Path.DirectorySeparatorChar + filename;
Stream fileStream = File.Open(filename, FileMode.Create, FileAccess.Write);
BinaryFormatter formatter = new BinaryFormatter();
formatter.Serialize(fileStream, obj);
fileStream.Close();
}
catch (Exception e)
{
Debug.LogWarning("Save.SaveFile(): Failed to serialize object to a file " + filename + " (Reason: " + e.Message + ")");
}
}
private static UserData LoadFile(string filename)
{
filename = Application.persistentDataPath + Path.DirectorySeparatorChar + filename;
if (File.Exists(filename))
{
try
{
Stream fileStream = File.Open(filename, FileMode.Open, FileAccess.Read);
BinaryFormatter formatter = new BinaryFormatter();
URD = (UserData)formatter.Deserialize(fileStream);
fileStream.Close();
return URD;
}
catch (Exception e)
{
Debug.LogWarning("LoadFile(): Failed to deserialize a file " + filename + " (Reason: " + e.Message + ")");
return UserData_Defaults();
}
}
else
{
URD = UserData_Defaults();
SaveFile(filename, URD);
return URD;
}
}
private static void Save_PList(string filename, List<SerialVect3> pList)
{
try
{
//filename = Application.persistentDataPath + Path.DirectorySeparatorChar + filename;
Stream fileStream = File.Open(filename, FileMode.Create, FileAccess.Write);
BinaryFormatter formatter = new BinaryFormatter();
formatter.Serialize(fileStream, pList);
fileStream.Close();
}
catch (Exception e)
{
Debug.LogWarning("Save.SaveFile(): Failed to serialize object to a file " + filename + " (Reason: " + e.Message + ")");
}
}
private static List<SerialVect3> Load_PList(string filename)
{
//filename = Application.persistentDataPath + Path.DirectorySeparatorChar + filename;
List<SerialVect3> pList = new List<SerialVect3>();
if (File.Exists(filename))
{
try
{
Stream fileStream = File.Open(filename, FileMode.Open, FileAccess.Read);
BinaryFormatter formatter = new BinaryFormatter();
pList = (List<SerialVect3>)formatter.Deserialize(fileStream);
fileStream.Close();
return pList;
}
catch (Exception e)
{
Debug.LogWarning("Load_PList(): Failed to deserialize pLIST " + filename + " (Reason: " + e.Message + ")");
return null;
}
}
else
{
return null;
}
}
}
Hang a rope from one controller with large Mass at the end – Can you get it to Orbit through Angular Momentum?