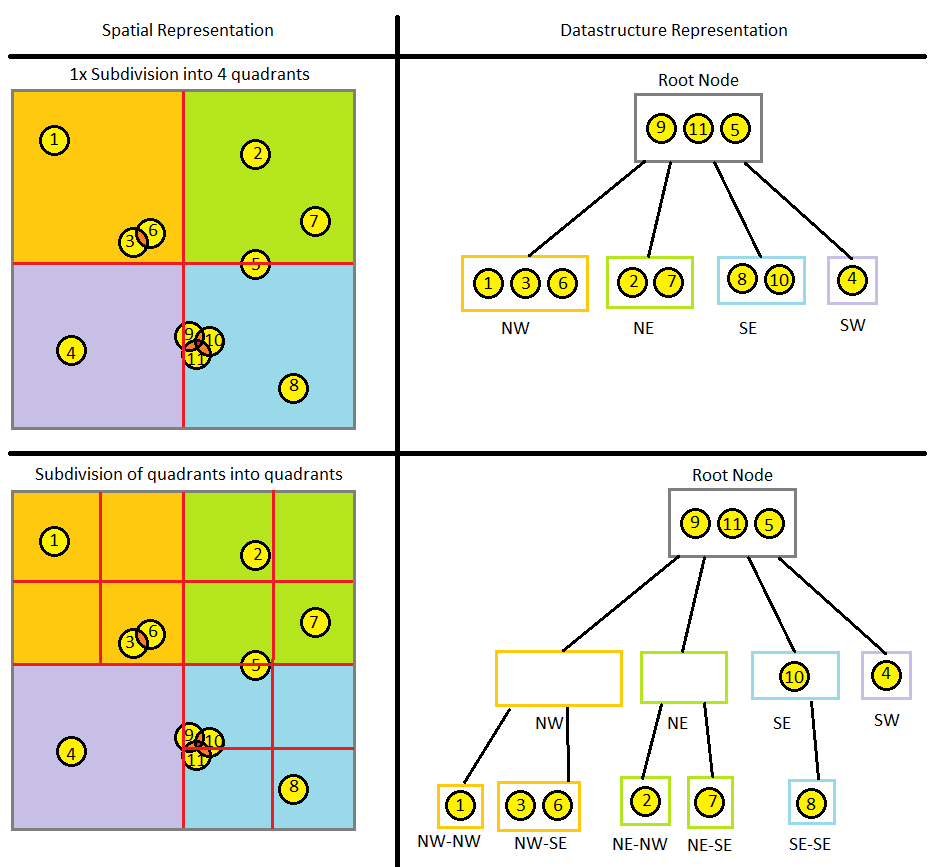
Quad Tree – Oct Tree – Hexa Tree
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using ArgosTweenSpacePuppy;
public class Spoke_Handler : MonoBehaviour
{
public bool setLastHeld = false;
public bool isInFulgurite = false;
public bool isBeingHeld = false;
public float maxFJForce = 1000f;
private Vector3 targetPos;
private Quaternion targetRot;
// +x,+y,+z,-x,-y,-z
public List<Spoke_AllShape> spoke_AS = new List<Spoke_AllShape>();
public Rigidbody rb;
private AF_Instance af_Instance;
public SphereCollider sphereCollider;
public AF_Network_Grabable netGrabbable;
public Touch_Lighting_and_Sound tls;
public Spoke_AllShape SAS1 { get; private set; }
public Spoke_AllShape SAS2 { get; private set; }
private GameObject AllShape_1;
private GameObject AllShape_2;
private GameObject objectToStay;
private GameObject objectToMove;
private Spoke_Handler spokeHandler_Object_to_Move;
private Spoke_Handler spokeHandler_Object_to_Stay;
private float tAccum_ST = 0f;
private float tDurr_ST = 1.5f;
private float tweenVAL = 0f;
private Vector3[] axisFLIPPER = { new Vector3 { x = 1, y = 0, z = 0 },
new Vector3 { x = 0, y = 1, z = 0 },
new Vector3 { x = 0, y = 0, z = 1 },
new Vector3 { x = -1, y = 0, z = 0 },
new Vector3 { x = 0, y =-1, z = 0 },
new Vector3 { x = 0, y = 0, z = -1},
};
public void Awake()
{
af_Instance = AF_Instance.Instance;
tls = GetComponent<Touch_Lighting_and_Sound>();
//TAG Spokes to access target transforms
for (int i = 0; i<spoke_AS.Count; i++)
{
spoke_AS[i].SetParent_AllShape(this, i);
tls.initializeColors_in_Spoke(spoke_AS[i]);
}
}
void Start()
{
}
public void Set_Target_Transform(Transform targ)
{
Vector3 center = (objectToMove.transform.position + objectToStay.transform.position) / 2f;
int idx1 = spokeHandler_Object_to_Move.Closest_Fin(center);
int idx2 = spokeHandler_Object_to_Stay.Closest_Fin(center);
Vector3 vin = spokeHandler_Object_to_Stay.spoke_AS[idx2].trans_to.vIN[idx1];
Vector3 vup = spokeHandler_Object_to_Stay.spoke_AS[idx2].trans_to.vUP[idx1];
Vector3 vInTrans = objectToStay.transform.TransformDirection(vin);
Vector3 vUpTrans = objectToStay.transform.TransformDirection(vup);
targetPos = targ.position;
targetRot = Quaternion.LookRotation(vInTrans, vUpTrans);
//Flip it - for minimal rotation to bonding FIN
if (Vector3.Dot(vUpTrans, objectToMove.transform.up) < 0 || Vector3.Dot(vInTrans, objectToMove.transform.forward) < 0)
{
Quaternion qRota = Quaternion.AngleAxis(180, axisFLIPPER[idx1]);
targetRot *= qRota;
}
}
public void SpokeTriggered(int idx, Spoke_AllShape sourceSpoke)
{
GameObject AS1 = spoke_AS[idx].myALL_SHAPE.gameObject;
Transform targ1 = spoke_AS[idx].targTransform;
GameObject AS2 = sourceSpoke.myALL_SHAPE.gameObject;
Transform targ2 = sourceSpoke.targTransform;
Determine_Target_Movement(AS1, targ1, AS2, targ2);
}
public void Determine_Target_Movement(GameObject AS1, Transform targ1, GameObject AS2, Transform targ2)
{
//Two calls - only take this one
if (AS1 == af_Instance.last_Held_AllShape /*|| (AS1.GetComponent<Spoke_Handler>().isBeingHeld)*/)
{
objectToMove = AS1;
objectToStay = AS2;
spokeHandler_Object_to_Move = objectToMove.GetComponent<Spoke_Handler>();
spokeHandler_Object_to_Stay = objectToStay.GetComponent<Spoke_Handler>();
spokeHandler_Object_to_Move.netGrabbable.DropItem(null, true, true);
spokeHandler_Object_to_Stay.netGrabbable.DropItem(null, true, true);
Set_Target_Transform(targ2);
tAccum_ST = 0.0f;
Debug.Log("Start COROUTINE:" + Time.time.ToString("F3"));
StartCoroutine(Move_to_Connect());
}
}
private IEnumerator Move_to_Connect()
{
spokeHandler_Object_to_Move.SetAllActive_Colliders(false, false);
spokeHandler_Object_to_Stay.SetAllActive_Colliders(false, false);
int i = 0; //Sanity check for infinite loops
float linProg = tAccum_ST / tDurr_ST;
while (i < 180 && linProg < 1)
{
tAccum_ST += Time.deltaTime;
linProg = tAccum_ST / tDurr_ST;
Mathf.Clamp(tAccum_ST, 0, tDurr_ST);
tweenVAL = EaseMethods.ExpoEaseInOut(tAccum_ST, 0, 1, tDurr_ST);
Move_AllShape_Into_Place(tweenVAL);
yield return true;
i++;
}
tAccum_ST = tDurr_ST;
tweenVAL = 1;
Move_AllShape_Into_Place(tweenVAL);
Set_Occupied_These_Spokes();
FixedJoint fj = objectToStay.AddComponent<FixedJoint>();
fj.autoConfigureConnectedAnchor = true;
fj.connectedBody = objectToMove.GetComponent<Rigidbody>();
spokeHandler_Object_to_Move.SetAllActive_Colliders(true, true);
spokeHandler_Object_to_Stay.SetAllActive_Colliders(true, true);
StopCoroutine("Move_to_Connect");
}
private void Move_AllShape_Into_Place(float val)
{
objectToMove.transform.position = Vector3.Lerp(objectToMove.transform.position, targetPos, val);
objectToMove.transform.rotation = Quaternion.Slerp(objectToMove.transform.rotation, targetRot, val);
}
private void Set_Occupied_These_Spokes()
{
Vector3 center = (objectToMove.transform.position + objectToStay.transform.position) / 2f;
int idx1 = spokeHandler_Object_to_Move.Closest_Fin(center);
int idx2 = spokeHandler_Object_to_Stay.Closest_Fin(center);
spokeHandler_Object_to_Move.setOccupied(idx1, true, spokeHandler_Object_to_Stay.spoke_AS[idx2]);
spokeHandler_Object_to_Stay.setOccupied(idx2, true, spokeHandler_Object_to_Move.spoke_AS[idx1]);
}
public void setOccupied(int spokeIDX, bool bOccupied, Spoke_AllShape connectedSpoke)
{
spoke_AS[spokeIDX].bOccupied = bOccupied;
tls.Light_Occupied(spoke_AS[spokeIDX], bOccupied);
spoke_AS[spokeIDX].connectedSpoke = connectedSpoke;
}
public void SetAllActive_Colliders(bool bOn, bool bSphereCollider)
{
sphereCollider.enabled = bSphereCollider;
rb.isKinematic = false; //MORE CONSIDERATIONS HERE
for (int i = 0; i < spoke_AS.Count; i++)
{
if (spoke_AS[i].bOccupied)
{
spoke_AS[i].enableCollider(false);
}
else
{
spoke_AS[i].enableCollider(bOn);
}
}
}
public int Closest_Fin(Vector3 testPos)
{
int idxMin = 0;
float minDistance = 1000000f;
float dist;
for (int i = 0; i < spoke_AS.Count; i++)
{
dist = (spoke_AS[i].fin_LOC.position - testPos).sqrMagnitude;
if(dist<minDistance)
{
idxMin = i;
minDistance = dist;
}
}
return idxMin;
}
public void SetAllColliders(bool bOn)
{
sphereCollider.enabled = bOn;
rb.isKinematic = true; //MORE CONSIDERATIONS HERE
for (int i = 0; i < spoke_AS.Count; i++)
{
spoke_AS[i].bOccupied = false;
spoke_AS[i].enableCollider(bOn);
}
}
public void Reset_Spokes_On_Grab()
{
for (int i = 0; i < spoke_AS.Count; i++)
{
if (spoke_AS[i].bOccupied)
{
spoke_AS[i].setOccupied(false);
}
}
}
void Update()
{
FixedJoint fj = GetComponent<FixedJoint>();
if(fj)
{
if(Vector3.Magnitude(fj.currentForce) > maxFJForce)
{
fj.connectedBody = null;
Destroy(fj);
}
}
if (setLastHeld)
{
af_Instance.last_Held_AllShape = this.gameObject;
setLastHeld = false;
}
}
}