
|
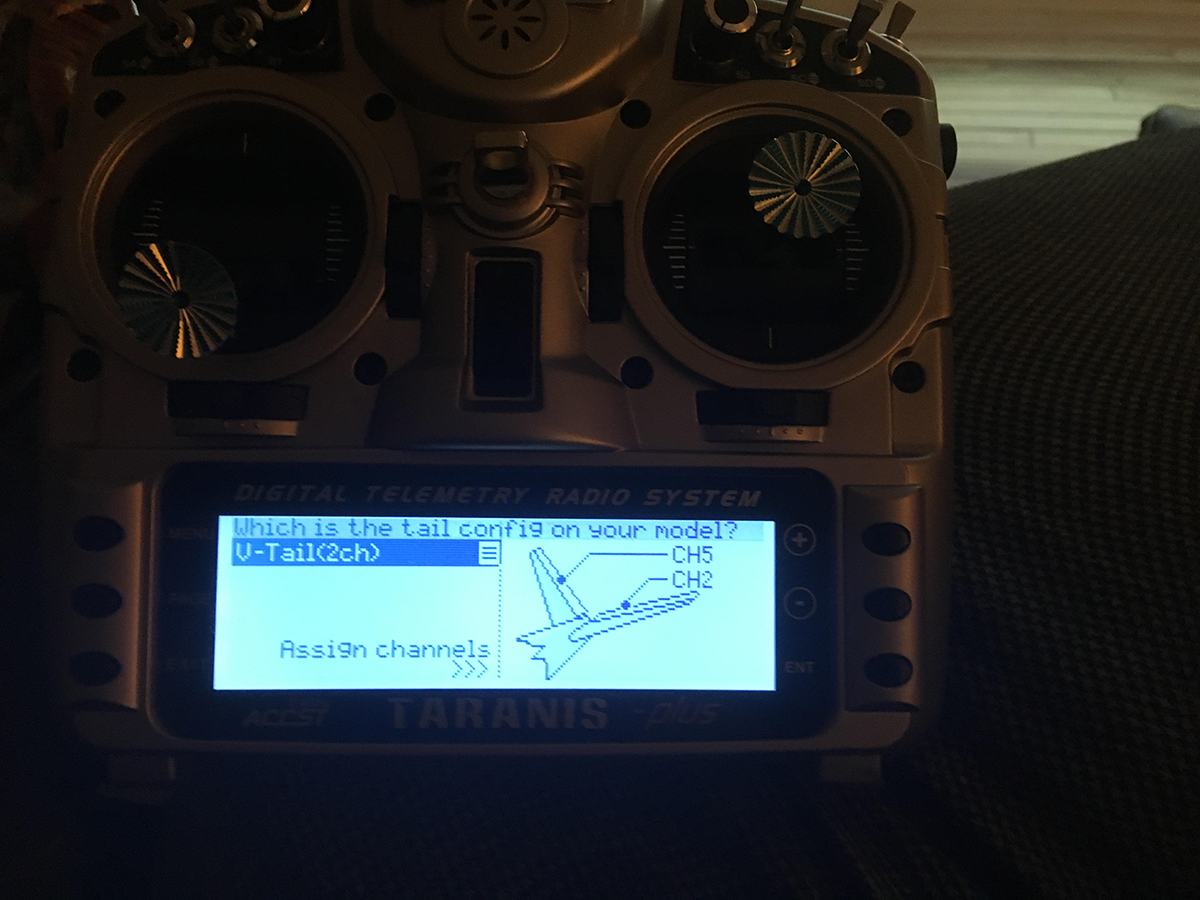
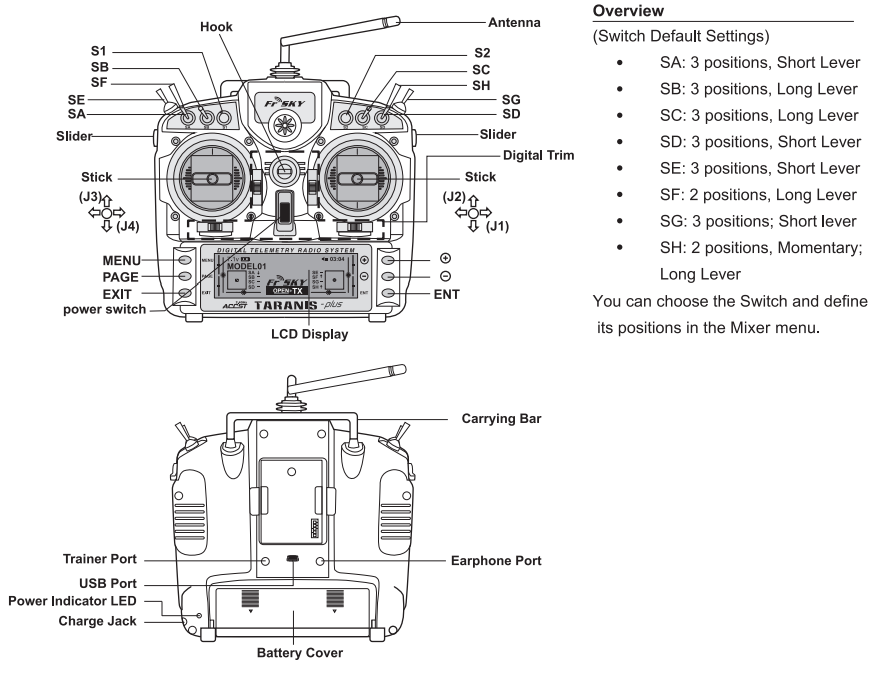
Put the QX7 in D8 mode in the radio menu.
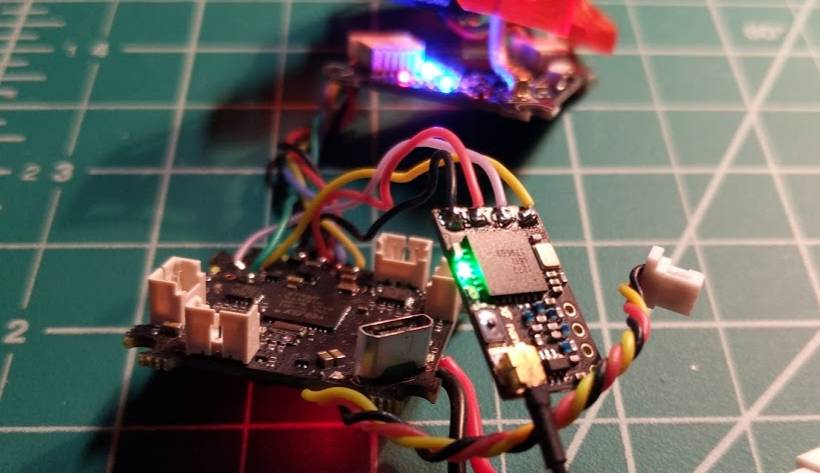
Download the Betaflight Configurator standalone software. Install the drivers found on the links on the homepage screen of the Betaflight Configurator. Plug the Tiny Hawk in to the pc with a usb data cable. Open Betaflight and click connect. In the Ports tab. Enable the ‘Serial Rx’ switch on UART 1 channel. click save. In the Configuration tab. Under receiver. Choose ‘Serial based receiver’ the ‘SBUS’ in the drop menu. click save. In the Configuration tab. Choose the DSHOT600 as the ESC/motor protocol. click save. Look at the Receiver tab. Move the sticks and switches on the radio and the bars on screen should also move.If there is no response. You’ll need to go back to the Ports tab and disable the ‘Serial Rx’ switch and try another uart channel like uart2 or uart3 etc. Only one ‘Serial Rx’ switch can be enabled at one time.Then go back to the Configuration tab. Choose ‘Serial based receiver’ the ‘SBUS’ etc again. click save. In the Ports tab. Do not disable the USB VCP switch otherwise you’ll need to reflash the fc. In the receiver tab. Verify the throttle, pitch, roll, yaw channels are on the correct sticks. If not, under ‘channel mapping’ re-arrange the letters AETR1234 to TAER1234 (or similar order). And click save. Also before flying you should calibrate the sticks end points to 1000 and 2000 and the centre to 1500 in the QX7 radio menu. Look at the values on the bars in the Receiver tab in Betaflight as a guide. Also before flying. Look in the Setup tab in Betaflight. Verify the 3D model’s front arrow is the same as the quad and the movement is correct if you move the quad around. |
|
|
Last edited by Airvortex; Feb 17, 2019 at 10:42 AM
|
# version # Betaflight / MATEKF411 (MK41) 3.5.0 Aug 14 2018 / 03:44:10 (1d710afd7) MSP API: 1.40 board_name MATEKF411 manufacturer_id # name name Tinyhawk # resources resource BEEPER 1 B02 resource MOTOR 1 B04 resource MOTOR 2 B05 resource MOTOR 3 B06 resource MOTOR 4 B07 resource MOTOR 5 B03 resource MOTOR 6 B10 resource MOTOR 7 NONE resource MOTOR 8 NONE resource SERVO 1 NONE resource SERVO 2 NONE resource SERVO 3 NONE resource SERVO 4 NONE resource SERVO 5 NONE resource SERVO 6 NONE resource SERVO 7 NONE resource SERVO 8 NONE resource PPM 1 A03 resource PWM 1 NONE resource PWM 2 NONE resource PWM 3 NONE resource PWM 4 NONE resource PWM 5 NONE resource PWM 6 NONE resource PWM 7 NONE resource PWM 8 NONE resource LED_STRIP 1 A08 resource SERIAL_TX 1 A09 resource SERIAL_TX 2 A02 resource SERIAL_TX 3 NONE resource SERIAL_TX 4 NONE resource SERIAL_TX 5 NONE resource SERIAL_TX 6 NONE resource SERIAL_TX 7 NONE resource SERIAL_TX 8 NONE resource SERIAL_TX 9 NONE resource SERIAL_TX 10 NONE resource SERIAL_TX 11 NONE resource SERIAL_TX 12 NONE resource SERIAL_RX 1 A10 resource SERIAL_RX 2 A03 resource SERIAL_RX 3 NONE resource SERIAL_RX 4 NONE resource SERIAL_RX 5 NONE resource SERIAL_RX 6 NONE resource SERIAL_RX 7 NONE resource SERIAL_RX 8 NONE resource SERIAL_RX 9 NONE resource SERIAL_RX 10 NONE resource SERIAL_RX 11 NONE resource SERIAL_RX 12 NONE resource I2C_SCL 1 B08 resource I2C_SCL 2 NONE resource I2C_SCL 3 NONE resource I2C_SDA 1 B09 resource I2C_SDA 2 NONE resource I2C_SDA 3 NONE resource LED 1 C13 resource LED 2 C14 resource LED 3 NONE resource RX_BIND 1 NONE resource RX_BIND_PLUG 1 NONE resource SPI_SCK 1 A05 resource SPI_SCK 2 B13 resource SPI_SCK 3 NONE resource SPI_MISO 1 A06 resource SPI_MISO 2 B14 resource SPI_MISO 3 NONE resource SPI_MOSI 1 A07 resource SPI_MOSI 2 B15 resource SPI_MOSI 3 NONE resource ESCSERIAL 1 NONE resource CAMERA_CONTROL 1 NONE resource ADC_BATT 1 B00 resource ADC_RSSI 1 NONE resource ADC_CURR 1 B01 resource ADC_EXT 1 NONE resource BARO_CS 1 NONE resource PINIO 1 NONE resource PINIO 2 NONE resource PINIO 3 NONE resource PINIO 4 NONE resource OSD_CS 1 B12 resource SPI_PREINIT_IPU 1 A04 resource SPI_PREINIT_IPU 2 B12 resource SPI_PREINIT_IPU 3 NONE resource SPI_PREINIT_IPU 4 NONE resource SPI_PREINIT_IPU 5 NONE resource SPI_PREINIT_IPU 6 NONE resource SPI_PREINIT_IPU 7 NONE resource SPI_PREINIT_IPU 8 NONE resource SPI_PREINIT_IPU 9 NONE resource SPI_PREINIT_IPU 10 NONE resource SPI_PREINIT_IPU 11 NONE resource SPI_PREINIT_OPU 1 NONE resource SPI_PREINIT_OPU 2 NONE # mixer mixer QUADX mmix reset # servo servo 0 1000 2000 1500 100 -1 servo 1 1000 2000 1500 100 -1 servo 2 1000 2000 1500 100 -1 servo 3 1000 2000 1500 100 -1 servo 4 1000 2000 1500 100 -1 servo 5 1000 2000 1500 100 -1 servo 6 1000 2000 1500 100 -1 servo 7 1000 2000 1500 100 -1 # servo mix smix reset # feature feature -RX_PPM feature -INFLIGHT_ACC_CAL feature -RX_SERIAL feature -MOTOR_STOP feature -SERVO_TILT feature -SOFTSERIAL feature -GPS feature -RANGEFINDER feature -TELEMETRY feature -3D feature -RX_PARALLEL_PWM feature -RX_MSP feature -RSSI_ADC feature -LED_STRIP feature -DISPLAY feature -OSD feature -CHANNEL_FORWARDING feature -TRANSPONDER feature -AIRMODE feature -RX_SPI feature -SOFTSPI feature -ESC_SENSOR feature -ANTI_GRAVITY feature -DYNAMIC_FILTER feature RX_SERIAL feature OSD feature AIRMODE feature ANTI_GRAVITY feature DYNAMIC_FILTER # beeper beeper GYRO_CALIBRATED beeper RX_LOST beeper RX_LOST_LANDING beeper DISARMING beeper ARMING beeper ARMING_GPS_FIX beeper BAT_CRIT_LOW beeper BAT_LOW beeper GPS_STATUS beeper RX_SET beeper ACC_CALIBRATION beeper ACC_CALIBRATION_FAIL beeper READY_BEEP beeper MULTI_BEEPS beeper DISARM_REPEAT beeper ARMED beeper SYSTEM_INIT beeper ON_USB beeper BLACKBOX_ERASE beeper CRASH FLIP beeper CAM_CONNECTION_OPEN beeper CAM_CONNECTION_CLOSED beeper RC_SMOOTHING_INIT_FAIL # beacon beacon GYRO_CALIBRATED beacon -RX_LOST beacon RX_LOST_LANDING beacon DISARMING beacon ARMING beacon ARMING_GPS_FIX beacon BAT_CRIT_LOW beacon BAT_LOW beacon GPS_STATUS beacon RX_SET beacon ACC_CALIBRATION beacon ACC_CALIBRATION_FAIL beacon READY_BEEP beacon MULTI_BEEPS beacon DISARM_REPEAT beacon ARMED beacon SYSTEM_INIT beacon ON_USB beacon BLACKBOX_ERASE beacon CRASH FLIP beacon CAM_CONNECTION_OPEN beacon CAM_CONNECTION_CLOSED beacon RC_SMOOTHING_INIT_FAIL # map map TAER1234 # serial serial 20 1 115200 57600 0 115200 serial 0 64 115200 57600 0 115200 serial 1 2048 115200 57600 0 115200 # led led 0 0,0::C:0 led 1 0,0::C:0 led 2 0,0::C:0 led 3 0,0::C:0 led 4 0,0::C:0 led 5 0,0::C:0 led 6 0,0::C:0 led 7 0,0::C:0 led 8 0,0::C:0 led 9 0,0::C:0 led 10 0,0::C:0 led 11 0,0::C:0 led 12 0,0::C:0 led 13 0,0::C:0 led 14 0,0::C:0 led 15 0,0::C:0 led 16 0,0::C:0 led 17 0,0::C:0 led 18 0,0::C:0 led 19 0,0::C:0 led 20 0,0::C:0 led 21 0,0::C:0 led 22 0,0::C:0 led 23 0,0::C:0 led 24 0,0::C:0 led 25 0,0::C:0 led 26 0,0::C:0 led 27 0,0::C:0 led 28 0,0::C:0 led 29 0,0::C:0 led 30 0,0::C:0 led 31 0,0::C:0 # color color 0 0,0,0 color 1 0,255,255 color 2 0,0,255 color 3 30,0,255 color 4 60,0,255 color 5 90,0,255 color 6 120,0,255 color 7 150,0,255 color 8 180,0,255 color 9 210,0,255 color 10 240,0,255 color 11 270,0,255 color 12 300,0,255 color 13 330,0,255 color 14 0,0,0 color 15 0,0,0 # mode_color mode_color 0 0 1 mode_color 0 1 11 mode_color 0 2 2 mode_color 0 3 13 mode_color 0 4 10 mode_color 0 5 3 mode_color 1 0 5 mode_color 1 1 11 mode_color 1 2 3 mode_color 1 3 13 mode_color 1 4 10 mode_color 1 5 3 mode_color 2 0 10 mode_color 2 1 11 mode_color 2 2 4 mode_color 2 3 13 mode_color 2 4 10 mode_color 2 5 3 mode_color 3 0 8 mode_color 3 1 11 mode_color 3 2 4 mode_color 3 3 13 mode_color 3 4 10 mode_color 3 5 3 mode_color 4 0 7 mode_color 4 1 11 mode_color 4 2 3 mode_color 4 3 13 mode_color 4 4 10 mode_color 4 5 3 mode_color 5 0 9 mode_color 5 1 11 mode_color 5 2 2 mode_color 5 3 13 mode_color 5 4 10 mode_color 5 5 3 mode_color 6 0 6 mode_color 6 1 10 mode_color 6 2 1 mode_color 6 3 0 mode_color 6 4 0 mode_color 6 5 2 mode_color 6 6 3 mode_color 6 7 6 mode_color 6 8 0 mode_color 6 9 0 mode_color 6 10 0 mode_color 7 0 3 # aux aux 0 0 0 1775 2100 0 0 aux 1 1 1 1700 2100 0 0 aux 2 2 1 1350 1650 0 0 aux 3 13 2 1300 2100 0 0 aux 4 35 3 1600 2100 0 0 aux 5 0 0 900 900 0 0 aux 6 0 0 900 900 0 0 aux 7 0 0 900 900 0 0 aux 8 0 0 900 900 0 0 aux 9 0 0 900 900 0 0 aux 10 0 0 900 900 0 0 aux 11 0 0 900 900 0 0 aux 12 0 0 900 900 0 0 aux 13 0 0 900 900 0 0 aux 14 0 0 900 900 0 0 aux 15 0 0 900 900 0 0 aux 16 0 0 900 900 0 0 aux 17 0 0 900 900 0 0 aux 18 0 0 900 900 0 0 aux 19 0 0 900 900 0 0 # adjrange adjrange 0 0 0 900 900 0 0 0 0 adjrange 1 0 0 900 900 0 0 0 0 adjrange 2 0 0 900 900 0 0 0 0 adjrange 3 0 0 900 900 0 0 0 0 adjrange 4 0 0 900 900 0 0 0 0 adjrange 5 0 0 900 900 0 0 0 0 adjrange 6 0 0 900 900 0 0 0 0 adjrange 7 0 0 900 900 0 0 0 0 adjrange 8 0 0 900 900 0 0 0 0 adjrange 9 0 0 900 900 0 0 0 0 adjrange 10 0 0 900 900 0 0 0 0 adjrange 11 0 0 900 900 0 0 0 0 adjrange 12 0 0 900 900 0 0 0 0 adjrange 13 0 0 900 900 0 0 0 0 adjrange 14 0 0 900 900 0 0 0 0 # rxrange rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1000 2000 # vtx vtx 0 0 0 0 900 900 vtx 1 0 0 0 900 900 vtx 2 0 0 0 900 900 vtx 3 0 0 0 900 900 vtx 4 0 0 0 900 900 vtx 5 0 0 0 900 900 vtx 6 0 0 0 900 900 vtx 7 0 0 0 900 900 vtx 8 0 0 0 900 900 vtx 9 0 0 0 900 900 # rxfail rxfail 0 a rxfail 1 a rxfail 2 a rxfail 3 a rxfail 4 h rxfail 5 h rxfail 6 h rxfail 7 h rxfail 8 h rxfail 9 h rxfail 10 h rxfail 11 h rxfail 12 h rxfail 13 h rxfail 14 h rxfail 15 h rxfail 16 h rxfail 17 h # master set align_gyro = DEFAULT set gyro_hardware_lpf = NORMAL set gyro_32khz_hardware_lpf = NORMAL set gyro_sync_denom = 1 set gyro_lowpass_type = PT1 set gyro_lowpass_hz = 100 set gyro_lowpass2_type = PT1 set gyro_lowpass2_hz = 300 set gyro_notch1_hz = 0 set gyro_notch1_cutoff = 0 set gyro_notch2_hz = 0 set gyro_notch2_cutoff = 0 set gyro_calib_duration = 125 set gyro_calib_noise_limit = 48 set gyro_offset_yaw = 0 set gyro_overflow_detect = ALL set yaw_spin_recovery = ON set yaw_spin_threshold = 1950 set gyro_use_32khz = OFF set dyn_notch_quality = 70 set dyn_notch_width_percent = 50 set align_acc = DEFAULT set acc_hardware = AUTO set acc_lpf_hz = 10 set acc_trim_pitch = 0 set acc_trim_roll = 0 set acc_calibration = -125,120,-157 set baro_bustype = I2C set baro_spi_device = 0 set baro_i2c_device = 1 set baro_i2c_address = 0 set baro_hardware = NONE set baro_tab_size = 21 set baro_noise_lpf = 600 set baro_cf_vel = 985 set baro_cf_alt = 965 set mid_rc = 1500 set min_check = 1050 set max_check = 2000 set rssi_channel = 9 set rssi_src_frame_errors = OFF set rssi_scale = 100 set rssi_offset = 0 set rssi_invert = OFF set rc_interp = AUTO set rc_interp_ch = RPYT set rc_interp_int = 19 set rc_smoothing_type = INTERPOLATION set rc_smoothing_input_hz = 0 set rc_smoothing_derivative_hz = 0 set rc_smoothing_debug_axis = ROLL set rc_smoothing_input_type = BIQUAD set rc_smoothing_derivative_type = BIQUAD set fpv_mix_degrees = 0 set max_aux_channels = 14 set serialrx_provider = SBUS set serialrx_inverted = OFF set spektrum_sat_bind = 0 set spektrum_sat_bind_autoreset = ON set airmode_start_throttle_percent = 32 set rx_min_usec = 885 set rx_max_usec = 2115 set serialrx_halfduplex = OFF set adc_device = 1 set input_filtering_mode = OFF set blackbox_p_ratio = 32 set blackbox_device = SERIAL set blackbox_record_acc = ON set blackbox_mode = NORMAL set min_throttle = 1070 set max_throttle = 2000 set min_command = 1000 set dshot_idle_value = 600 set dshot_burst = OFF set use_unsynced_pwm = OFF set motor_pwm_protocol = DSHOT600 set motor_pwm_rate = 480 set motor_pwm_inversion = OFF set motor_poles = 14 set thr_corr_value = 0 set thr_corr_angle = 800 set failsafe_delay = 4 set failsafe_off_delay = 10 set failsafe_throttle = 1000 set failsafe_switch_mode = STAGE1 set failsafe_throttle_low_delay = 100 set failsafe_procedure = DROP set align_board_roll = 0 set align_board_pitch = 0 set align_board_yaw = 0 set gimbal_mode = NORMAL set bat_capacity = 0 set vbat_max_cell_voltage = 45 set vbat_full_cell_voltage = 41 set vbat_min_cell_voltage = 32 set vbat_warning_cell_voltage = 33 set vbat_hysteresis = 1 set current_meter = ADC set battery_meter = ADC set vbat_detect_cell_voltage = 30 set use_vbat_alerts = ON set use_cbat_alerts = OFF set cbat_alert_percent = 10 set vbat_cutoff_percent = 100 set vbat_scale = 110 set vbat_divider = 10 set vbat_multiplier = 1 set ibata_scale = 400 set ibata_offset = 0 set ibatv_scale = 0 set ibatv_offset = 0 set beeper_inversion = ON set beeper_od = OFF set beeper_frequency = 0 set beeper_dshot_beacon_tone = 1 set yaw_motors_reversed = OFF set crashflip_motor_percent = 20 set 3d_deadband_low = 1406 set 3d_deadband_high = 1514 set 3d_neutral = 1460 set 3d_deadband_throttle = 50 set 3d_limit_low = 1000 set 3d_limit_high = 2000 set 3d_switched_mode = OFF set servo_center_pulse = 1500 set servo_pwm_rate = 50 set servo_lowpass_hz = 0 set tri_unarmed_servo = ON set channel_forwarding_start = 4 set reboot_character = 82 set serial_update_rate_hz = 100 set accxy_deadband = 40 set accz_deadband = 40 set acc_unarmedcal = ON set imu_dcm_kp = 2500 set imu_dcm_ki = 0 set small_angle = 45 set auto_disarm_delay = 5 set gyro_cal_on_first_arm = OFF set gps_provider = NMEA set gps_sbas_mode = AUTO set gps_auto_config = ON set gps_auto_baud = OFF set gps_ublox_use_galileo = OFF set gps_rescue_angle = 32 set gps_rescue_initial_alt = 50 set gps_rescue_descent_dist = 200 set gps_rescue_ground_speed = 2000 set gps_rescue_throttle_p = 150 set gps_rescue_throttle_i = 20 set gps_rescue_throttle_d = 50 set gps_rescue_velocity_p = 80 set gps_rescue_velocity_i = 20 set gps_rescue_velocity_d = 15 set gps_rescue_yaw_p = 40 set gps_rescue_throttle_min = 1200 set gps_rescue_throttle_max = 1600 set gps_rescue_throttle_hover = 1280 set gps_rescue_sanity_checks = RESCUE_SANITY_ON set gps_rescue_min_sats = 8 set deadband = 0 set yaw_deadband = 0 set yaw_control_reversed = OFF set pid_process_denom = 1 set runaway_takeoff_prevention = ON set runaway_takeoff_deactivate_delay = 500 set runaway_takeoff_deactivate_throttle_percent = 25 set tlm_inverted = OFF set tlm_halfduplex = ON set frsky_default_lat = 0 set frsky_default_long = 0 set frsky_gps_format = 0 set frsky_unit = IMPERIAL set frsky_vfas_precision = 0 set hott_alarm_int = 5 set pid_in_tlm = OFF set report_cell_voltage = OFF set ibus_sensor = 1,2,3,0,0,0,0,0,0,0,0,0,0,0,0 set smartport_use_extra_sensors = OFF set ledstrip_visual_beeper = OFF set ledstrip_grb_rgb = GRB set osd_units = METRIC set osd_warn_arming_disable = ON set osd_warn_batt_not_full = ON set osd_warn_batt_warning = ON set osd_warn_batt_critical = ON set osd_warn_visual_beeper = ON set osd_warn_crash_flip = ON set osd_warn_esc_fail = ON set osd_warn_core_temp = OFF set osd_rssi_alarm = 20 set osd_cap_alarm = 2200 set osd_alt_alarm = 100 set osd_esc_temp_alarm = -128 set osd_esc_rpm_alarm = -1 set osd_esc_current_alarm = -1 set osd_core_temp_alarm = 70 set osd_ah_max_pit = 20 set osd_ah_max_rol = 40 set osd_tim1 = 2560 set osd_tim2 = 2561 set osd_vbat_pos = 2421 set osd_rssi_pos = 2372 set osd_tim_1_pos = 234 set osd_tim_2_pos = 2389 set osd_remaining_time_estimate_pos = 234 set osd_flymode_pos = 234 set osd_anti_gravity_pos = 234 set osd_g_force_pos = 234 set osd_throttle_pos = 234 set osd_vtx_channel_pos = 2403 set osd_crosshairs_pos = 205 set osd_ah_sbar_pos = 206 set osd_ah_pos = 78 set osd_current_pos = 234 set osd_mah_drawn_pos = 234 set osd_craft_name_pos = 2442 set osd_gps_speed_pos = 234 set osd_gps_lon_pos = 234 set osd_gps_lat_pos = 234 set osd_gps_sats_pos = 234 set osd_home_dir_pos = 234 set osd_home_dist_pos = 234 set osd_compass_bar_pos = 234 set osd_altitude_pos = 234 set osd_pid_roll_pos = 234 set osd_pid_pitch_pos = 234 set osd_pid_yaw_pos = 234 set osd_debug_pos = 234 set osd_power_pos = 234 set osd_pidrate_profile_pos = 234 set osd_warnings_pos = 329 set osd_avg_cell_voltage_pos = 234 set osd_pit_ang_pos = 234 set osd_rol_ang_pos = 234 set osd_battery_usage_pos = 234 set osd_disarmed_pos = 234 set osd_nheading_pos = 234 set osd_nvario_pos = 234 set osd_esc_tmp_pos = 234 set osd_esc_rpm_pos = 234 set osd_rtc_date_time_pos = 234 set osd_adjustment_range_pos = 234 set osd_core_temp_pos = 234 set osd_stat_rtc_date_time = OFF set osd_stat_tim_1 = OFF set osd_stat_tim_2 = ON set osd_stat_max_spd = OFF set osd_stat_max_dist = OFF set osd_stat_min_batt = ON set osd_stat_endbatt = OFF set osd_stat_battery = OFF set osd_stat_min_rssi = ON set osd_stat_max_curr = OFF set osd_stat_used_mah = OFF set osd_stat_max_alt = OFF set osd_stat_bbox = OFF set osd_stat_bb_no = OFF set task_statistics = ON set debug_mode = NONE set rate_6pos_switch = OFF set cpu_overclock = OFF set pwr_on_arm_grace = 5 set vtx_band = 5 set vtx_channel = 4 set vtx_power = 1 set vtx_low_power_disarm = OFF set vtx_freq = 5769 set vtx_pit_mode_freq = 0 set vtx_halfduplex = ON set vcd_video_system = NTSC set vcd_h_offset = 0 set vcd_v_offset = 0 set max7456_clock = DEFAULT set max7456_spi_bus = 2 set displayport_msp_col_adjust = 0 set displayport_msp_row_adjust = 0 set displayport_max7456_col_adjust = 0 set displayport_max7456_row_adjust = 0 set displayport_max7456_inv = OFF set displayport_max7456_blk = 0 set displayport_max7456_wht = 2 set esc_sensor_halfduplex = OFF set esc_sensor_current_offset = 0 set led_inversion = 0 set dashboard_i2c_bus = 1 set dashboard_i2c_addr = 60 set camera_control_mode = HARDWARE_PWM set camera_control_ref_voltage = 330 set camera_control_key_delay = 180 set camera_control_internal_resistance = 470 set camera_control_inverted = OFF set pinio_config = 1,1,1,1 set pinio_box = 255,255,255,255 set usb_hid_cdc = OFF set rcdevice_init_dev_attempts = 4 set rcdevice_init_dev_attempt_interval = 1000 # profile profile 1 set dterm_lowpass_type = PT1 set dterm_lowpass_hz = 80 set dterm_lowpass2_hz = 170 set dterm_notch_hz = 0 set dterm_notch_cutoff = 0 set vbat_pid_gain = OFF set pid_at_min_throttle = ON set anti_gravity_mode = SMOOTH set anti_gravity_threshold = 250 set anti_gravity_gain = 5000 set feedforward_transition = 25 set acc_limit_yaw = 100 set acc_limit = 0 set crash_dthreshold = 50 set crash_gthreshold = 400 set crash_setpoint_threshold = 350 set crash_time = 500 set crash_delay = 0 set crash_recovery_angle = 10 set crash_recovery_rate = 100 set crash_limit_yaw = 200 set crash_recovery = OFF set iterm_rotation = OFF set smart_feedforward = OFF set iterm_relax = RPY set iterm_relax_type = GYRO set iterm_relax_cutoff = 11 set iterm_windup = 40 set iterm_limit = 150 set pidsum_limit = 500 set pidsum_limit_yaw = 400 set yaw_lowpass_hz = 100 set throttle_boost = 4 set throttle_boost_cutoff = 15 set acro_trainer_angle_limit = 20 set acro_trainer_lookahead_ms = 50 set acro_trainer_debug_axis = ROLL set acro_trainer_gain = 75 set p_pitch = 100 set i_pitch = 120 set d_pitch = 90 set f_pitch = 90 set p_roll = 100 set i_roll = 120 set d_roll = 90 set f_roll = 90 set p_yaw = 90 set i_yaw = 90 set d_yaw = 40 set f_yaw = 80 set p_level = 25 set i_level = 20 set d_level = 75 set level_limit = 25 set horizon_tilt_effect = 75 set horizon_tilt_expert_mode = OFF set abs_control_gain = 5 set abs_control_limit = 90 set abs_control_error_limit = 20 # profile profile 2 set dterm_lowpass_type = PT1 set dterm_lowpass_hz = 80 set dterm_lowpass2_hz = 170 set dterm_notch_hz = 0 set dterm_notch_cutoff = 0 set vbat_pid_gain = OFF set pid_at_min_throttle = ON set anti_gravity_mode = SMOOTH set anti_gravity_threshold = 250 set anti_gravity_gain = 5000 set feedforward_transition = 25 set acc_limit_yaw = 100 set acc_limit = 0 set crash_dthreshold = 50 set crash_gthreshold = 400 set crash_setpoint_threshold = 350 set crash_time = 500 set crash_delay = 0 set crash_recovery_angle = 10 set crash_recovery_rate = 100 set crash_limit_yaw = 200 set crash_recovery = OFF set iterm_rotation = OFF set smart_feedforward = OFF set iterm_relax = RPY set iterm_relax_type = GYRO set iterm_relax_cutoff = 11 set iterm_windup = 40 set iterm_limit = 150 set pidsum_limit = 500 set pidsum_limit_yaw = 400 set yaw_lowpass_hz = 100 set throttle_boost = 4 set throttle_boost_cutoff = 15 set acro_trainer_angle_limit = 20 set acro_trainer_lookahead_ms = 50 set acro_trainer_debug_axis = ROLL set acro_trainer_gain = 75 set p_pitch = 100 set i_pitch = 120 set d_pitch = 90 set f_pitch = 90 set p_roll = 100 set i_roll = 120 set d_roll = 90 set f_roll = 90 set p_yaw = 90 set i_yaw = 90 set d_yaw = 40 set f_yaw = 80 set p_level = 25 set i_level = 20 set d_level = 75 set level_limit = 25 set horizon_tilt_effect = 75 set horizon_tilt_expert_mode = OFF set abs_control_gain = 5 set abs_control_limit = 90 set abs_control_error_limit = 20 # profile profile 0 set dterm_lowpass_type = PT1 set dterm_lowpass_hz = 80 set dterm_lowpass2_hz = 170 set dterm_notch_hz = 0 set dterm_notch_cutoff = 0 set vbat_pid_gain = OFF set pid_at_min_throttle = ON set anti_gravity_mode = SMOOTH set anti_gravity_threshold = 250 set anti_gravity_gain = 5000 set feedforward_transition = 25 set acc_limit_yaw = 100 set acc_limit = 0 set crash_dthreshold = 50 set crash_gthreshold = 400 set crash_setpoint_threshold = 350 set crash_time = 500 set crash_delay = 0 set crash_recovery_angle = 10 set crash_recovery_rate = 100 set crash_limit_yaw = 200 set crash_recovery = OFF set iterm_rotation = OFF set smart_feedforward = OFF set iterm_relax = RPY set iterm_relax_type = GYRO set iterm_relax_cutoff = 11 set iterm_windup = 40 set iterm_limit = 150 set pidsum_limit = 500 set pidsum_limit_yaw = 400 set yaw_lowpass_hz = 100 set throttle_boost = 4 set throttle_boost_cutoff = 15 set acro_trainer_angle_limit = 20 set acro_trainer_lookahead_ms = 50 set acro_trainer_debug_axis = ROLL set acro_trainer_gain = 75 set p_pitch = 100 set i_pitch = 120 set d_pitch = 90 set f_pitch = 90 set p_roll = 100 set i_roll = 120 set d_roll = 90 set f_roll = 90 set p_yaw = 90 set i_yaw = 90 set d_yaw = 40 set f_yaw = 80 set p_level = 25 set i_level = 20 set d_level = 75 set level_limit = 25 set horizon_tilt_effect = 75 set horizon_tilt_expert_mode = OFF set abs_control_gain = 5 set abs_control_limit = 90 set abs_control_error_limit = 20 # rateprofile rateprofile 2 set thr_mid = 50 set thr_expo = 55 set rates_type = BETAFLIGHT set roll_rc_rate = 100 set pitch_rc_rate = 100 set yaw_rc_rate = 100 set roll_expo = 70 set pitch_expo = 70 set yaw_expo = 30 set roll_srate = 78 set pitch_srate = 78 set yaw_srate = 50 set tpa_rate = 10 set tpa_breakpoint = 1650 set throttle_limit_type = OFF set throttle_limit_percent = 100 # rateprofile rateprofile 1 set thr_mid = 50 set thr_expo = 50 set rates_type = BETAFLIGHT set roll_rc_rate = 100 set pitch_rc_rate = 100 set yaw_rc_rate = 80 set roll_expo = 50 set pitch_expo = 50 set yaw_expo = 20 set roll_srate = 80 set pitch_srate = 80 set yaw_srate = 60 set tpa_rate = 10 set tpa_breakpoint = 1650 set throttle_limit_type = OFF set throttle_limit_percent = 100 # rateprofile rateprofile 0 set thr_mid = 50 set thr_expo = 50 set rates_type = BETAFLIGHT set roll_rc_rate = 80 set pitch_rc_rate = 80 set yaw_rc_rate = 80 set roll_expo = 60 set pitch_expo = 60 set yaw_expo = 20 set roll_srate = 60 set pitch_srate = 60 set yaw_srate = 60 set tpa_rate = 10 set tpa_breakpoint = 1650 set throttle_limit_type = OFF set throttle_limit_percent = 100 save






![]()



|

|


|
Sun, Jul 21, 2:28 PM (6 days ago) |
|
||
|
||||
Just for info:
From: David W. Johnson <dj@argos.vu>
Date: Sun, Jul 21, 2019 at 1:22 PM
Subject: Re: Your Quad order from QuadHaus
To: Random FPV <randomfpv@gmail.com>
Chris,
Hi David,
Thanks so much for your reply. Normally my builds take from 7-10 days as I need to order parts to complete the build, so getting it ready and delivered by the 27th may be cutting it close.I could put together a build for you with the parts I have in stock, but it would be a different flight controller and motors then were advertised.Just let me know, I can substitute the Cl Racing F4s flight controller, and cobra motors 2207/2450kv I have in stock.Otherwise I will go ahead and order the master pilots and the brain radix FC.I dont mind to ship your build where you need it when its done, just let me know how you would like to proceed.For the transmitter, the build is also advertised with a TBS Crossfire Micro RX receiver, so you would need the crossfire system installed in your radio to use it.Alternatively if you would like me to install a walkera RX that would be compatible with the Devo7 radio I can look into that and order the appropriate RX.I would suggest that you upgrade your radio to at least a FRsky taranis Qx7 or X9D SE. I have used both and they are both great radios.I could install an FRsky RX or you could upgrade them with the crossfire system if you want the absolute best control link money can buy.I know at first alot of these terms can be overwhelming, so Im glad to help you and offer any advice you need, just ask me any questions you have.The goal would be to get you in the air with the least amount of stress and headache.in closing, just let me know if you want me to proceed with what I have in stock, and what radio you plan to use, and we can go from there.(I personally use crossfire, once you try it you wont want anything else)regards,Chris BRandom FpvOn Sat, Jul 20, 2019 at 3:38 PM David W. Johnson <dj@argos.vu> wrote:Hi Chris,
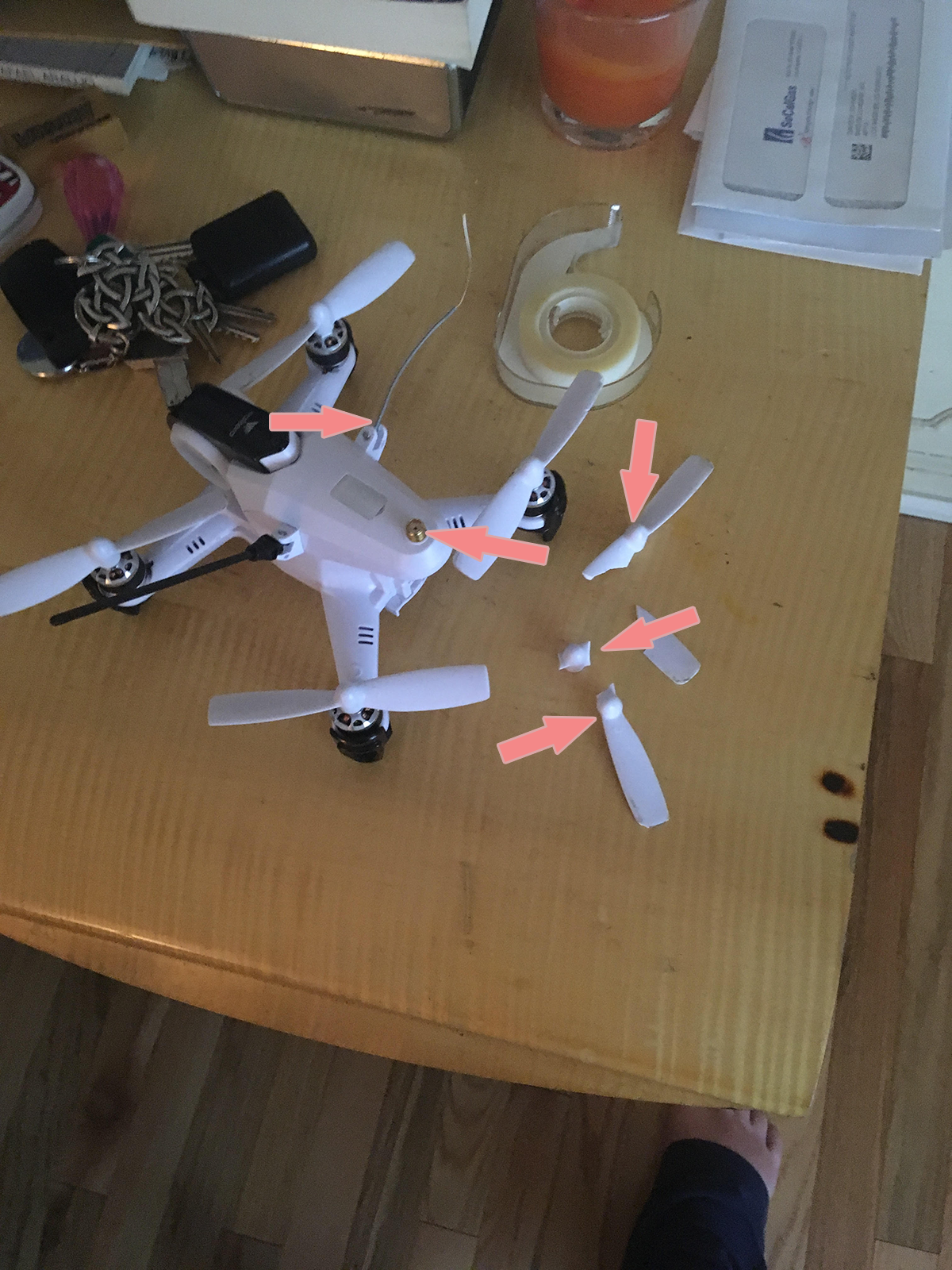
Thanks for getting back to me.Let’s go with:The TBS masterpilot motors and teal.You do a great job! I watched a few of your videos last week and enjoy your style. (see video). Is it possible to get this project completed and delivered by July 26th or 27th? I plan on taking it with me on a trip to Sacramento, California and then to Dinosaur, Colorado to attempt some filming with a group of Electric Geologists.Hopefully this will fit into the GoPro Mount:(Should be arriving tomorrow)(link)I’m new to the hobby and just getting up to speed. I purchased an inexpensive drone a few weeks ago (Walkera f150) to train on. (I used to fly RC as a kid back in the 70s) Will it be possible/recommended to bind the the signature build your putting together to the Devo7 transmitter? If not, could you recommend your choice of transmitter for the build your putting together somewhere in the $150 -$250 range.There was a conference in Phoenix in 2017 where electric geologist and enthusiast got together under the umbrella of “The Thunderbolts Project”.A group of enthusiasts formed who are obsessed with determining whether the morphology of the Canyon Lands area of Utah and surrounding areas is the result of a very large plasma discharge in the not so distant past. (10,000 to 12,000 years ago.)Here is a link to how this thing is coming together:Thanks again very much.Looking forward to flying your build and hearing back from you.David JohnsonFounder/DeveloperOn Sat, Jul 20, 2019 at 8:42 AM Random FPV <randomfpv@gmail.com> wrote:Hi David,
I wanted to reach out and thank you for your purchase.Would you prefer the TBS masterpilot motors, or the Armattan OOMphs?Also, would you prefer red or teal for your 3d prints?Just let me know and I will get the correct motors installed for you, and thanks again for choosingto shop with Quad Haus.regards,Chris BRandom FPV
Thanks very much Chris,
Hi David,
Thanks for your reply, its my pleasure, and I appreciate you working with me to use what I had in stock. Im literally going to send you the antenna off my quad as I was out of stock on those, so please dont worry if the antenna looks a touch worn,it has been used before but should work fine for you. I just finished up testing the build and all is well, Ill get it to the post office first thing tomorrow. Whats the latest it can be delivered, do I need to overnight it to you?Just let me know so when I go to the post office Im aware what we need to do, and thanks again for the order.regards,Chris BOn Tue, Jul 23, 2019 at 11:47 AM David W. Johnson <dj@argos.vu> wrote:Thanks Chris,
The Address is:David Johnson8450 DeLongpre Ave, West Hollywood, CA 90069 #6323-868-0851Please send me the tracking info so I can follow the trajectory of its path, as well, of course.I will cover any additional costs to make sure it is properly insured and expedited as well.This will be the first get together of this group in Northern California with a caravan to Utah. We are planning another trip in the fall.Thanks very much for putting this together for us.🙂/djfounder/developerOn Tue, Jul 23, 2019 at 7:15 AM Random FPV <randomfpv@gmail.com> wrote:Hi David,
Those should be perfect. Im finishing up the build now and will test it later this afternoon. The printer is printing your accessories as we speak 🙂Im hoping to get it in the mail to you tomorrow morning, so please send the address you would like it delivered to on the 27th.Ill wait until I hear back from you to send it, Im not sure if you will still be in town then or if we need to send it to you out of town?Just let me know what works best for you and we will go from there.regards,ChrisOn Mon, Jul 22, 2019 at 5:09 PM David W. Johnson <dj@argos.vu> wrote:Hi Chris,
I placed the order attached. Hopefully this will work with the build you are putting together for us.I intend to follow the procedure outlined in this video to set up the TBS Crossfire TX.If you get the chance, let me know if I’m heading in the right direction on this to set up communications with the build you are doing for us.Thanks very much./dj———- Forwarded message ———
From: GetFPV.com <noreply@getfpv.com>
Date: Mon, Jul 22, 2019 at 12:24 PM
Subject: David, your order has shipped from GetFPV.com!
To: <dj@argos.vu>
GetFPV
1060 Goodrich Ave
Sarasota, Florida 34236
941-444-0021
https://getfpv.com
Order: Order #100575841 Placed: 7/22/2019 Shipping: FedEx Guaranteed – 2nd Day Arrives on 7/24
Ship To David Johnson
8450 De Longpre Ave Apt 6
West Hollywood, California 90069-2612
323-656-5811
dj@argos.vu
Bill To David Johnson
8450 De Longpre Ave Apt 6
West Hollywood, California 90069-2612
323-656-5811
dj@argos.vu
Shipping and Tracking Information
Shipped on 7/22/2019 using FedEx 2Day®: 788613533694 Order Details
Item # Name QTY 2981 TBS Crossfire TX – Long Range R/C Link 1 4378 FrSky Taranis X9D Plus 2.4GHz ACCST Radio w/ Soft Case (Mode 2) 1
Notes
Order: Order #100575841
Shipment: 100544213Thank you for your purchase!
Please do not reply to this email, it will not be received!
If you have questions about your order please visit us online at https://getfpv.com or email us at support@getfpv.com.
Like us on Facebook and follow us on Twitter to get all the breaking news and sales first!




